The development of intelligent prosthetic limbs has made significant progress following the efforts of scientists at Southern University of Science and Technology (SUSTech).
Following the publication of four papers in the last six months, a research team led by Professor Chenglong Fu (Mechanical and Energy Engineering) has made considerable developments in the field of human-augmented robotics. Their papers were published in the high-impact academic journals, IEEE Transactions on Cybernetics, IEEE Transactions on Neural Systems and Rehabilitation Engineering, Mechanism and Machine Theory, and ASME Journal of Mechanisms and Robotics.
The paper published in IEEE Transactions on Cybernetics (IF = 10.387) was titled “A Subvision System for Enhancing the Environmental Adaptability of the Powered Transfemoral Prosthesis.” It covered their research on intelligent prosthetics that can “see.”
One of the major problems for amputees is using powered prosthetic limbs in complex environments. Previous studies have focused on the information interface between humans and prosthetics. The lack of neural signals has sent researchers to look at alternative pathways such as inertial measurement units (IMU) and surface electromyography (EMG).
However, current technology tends to be slow and noisy due to the signals from humans being user-dependent. As a result, there is an enormous challenge to develop reliable and timely vision-locomotion loops based on human-prosthetic interfaces.
The research team took a unique approach by developing a vision system within their intelligent prosthetic limb, which led to significant progress in the creation of a complete vision-locomotion loop.
Their intelligent prosthesis design included a vision system that is integrated with a real-time locomotion control system. The cameras (or vision system) can perceive the environment, working with the sub-vision system to control the motion of the prosthetic. The creation of the complete vision-locomotion loop provides non-rhythmic locomotion that learns to adjust to new environments.
Their system was validated by their experiments. These tests required amputees to walk up and down daily terrains, while also testing a variety of obstacles. The proposed intelligent prosthetic adapted to the environment better and provided amputees with a more convenient walking experience.
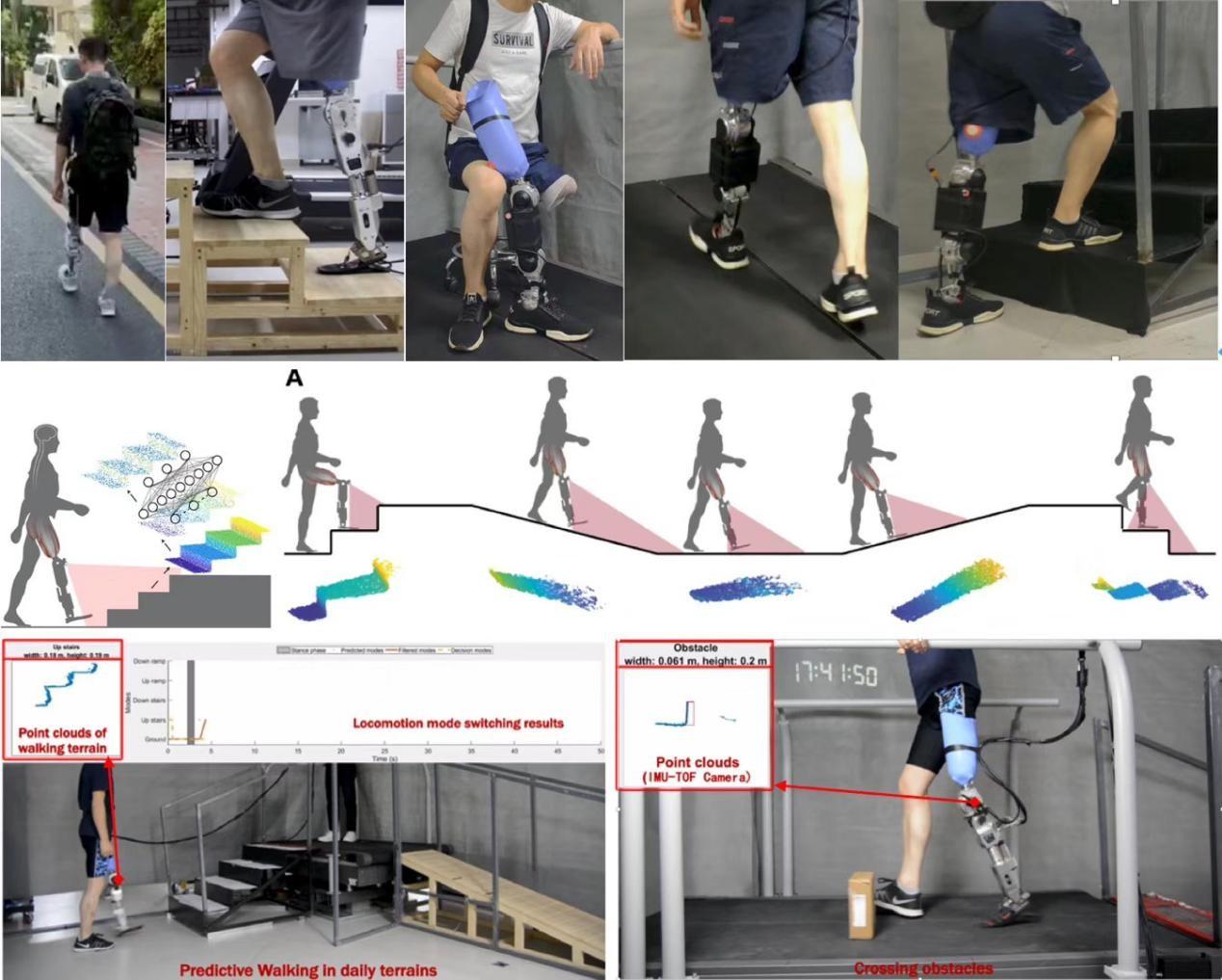
Figure 1: Smart prosthesis with a vision system helped transfemoral amputees to walk in complex environments.
MEE doctoral candidate Kuangen Zhang was the first author of the paper, with Chenglong Fu as the correspondent author. Other contributions came from the University of British Columbia (UBC).
The paper published in IEEE Transactions on Neural Systems and Rehabilitation Engineering (IF = 3.478) was titled, “Unsupervised Cross-Subject Adaptation for Predicting Human Locomotion Intent.” They proposed a method to predict the intent of the human motion, which reduced the data requirements of researchers and subjects.
Traditional methodologies require the collection and classification for each new intent of the human motion, setting an enormous burden on all involved. The researchers decided to use an unsupervised cross-subject method to predict the intent of a subject with unknown data labels.
Their methodology was realized by designing two classifiers to maximize the discrepancy between classifications and a generator to align the hidden features of the source. A neural network is trained with the labeled set of source subjects before assessing the unlabeled training set against the labeled set.
Their experiments showed that this technique could effectively classify the intent and activities of the target subject at over 93% across two different datasets. It offers enormous potential for people with disabilities and the control of wearable robots.
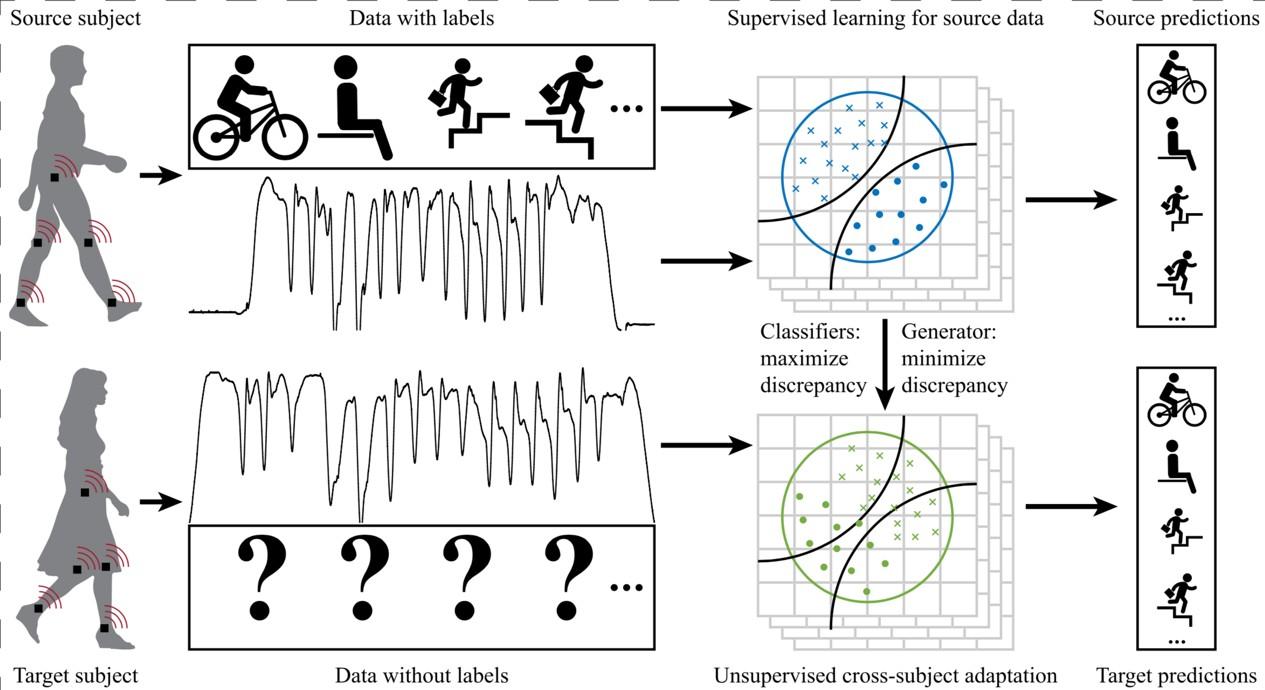
Figure 2: The framework of the unsupervised cross-subject adaptation for predicting the intent of human locomotion.
MEE doctoral candidate Kuangen Zhang was the first author of the paper, with Chenglong Fu as the correspondent author. Other contributions came from the University of British Columbia (UBC).
The paper published in Mechanism and Machine Theory (IF = 3.535) was titled “Energy performance analysis of a suspended backpack with an optimally controlled variable damper for human load carriage.”
For many employees, they are required to carry heavy loads. The human energy expended as part of this is mostly a waste, so a more efficient method is needed.
The research team found inspiration in the shoulder pole for carrying loads. They studied the energy performance of humans carrying loads with a variably dampened suspended backpack. They found that the optimal control was found to switch four times between the minimum and maximum damping cycle.
Their simulations revealed that their suspended backpack with a controlled variable damper significantly improved the efficiency of carrying a load while reducing the force on the carriers. It also saw less energy expended, increased comfort, and more robust adaptability compared to the existing passive elastic backpacks.
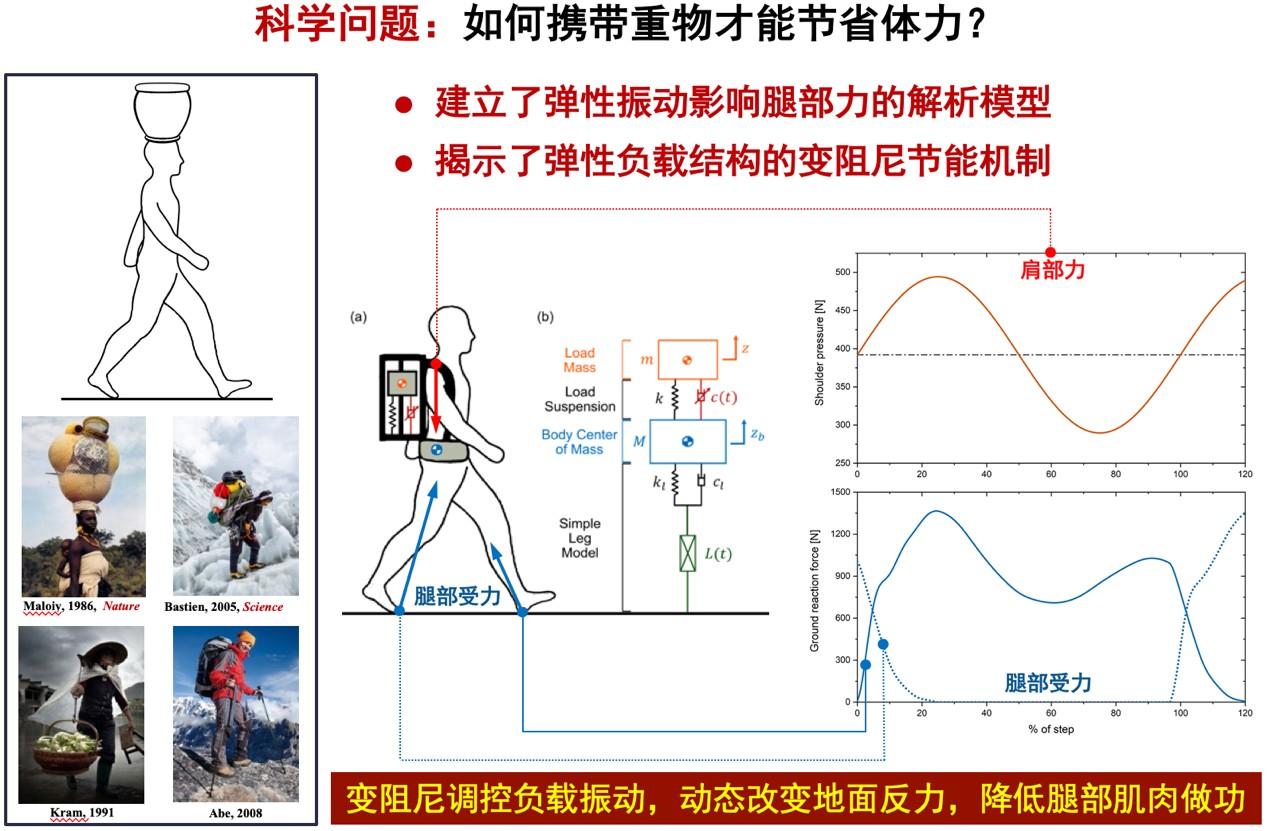
Figure 3: A simple model of human walking with a variable damped elastically suspended backpack.
Tsinghua University doctoral candidate Lianxin Yang was the first author of the paper, with Professor Chenglong Fu as the correspondent author.
The paper published in ASME Journal of Mechanisms and Robotics (IF = 2.377) was titled “A Lower Limb Exoskeleton Recycling Energy From Knee and Ankle Joints to Assist Push-Off.” The researchers sought to design a quasi-passive lower-limb exoskeleton that was able to recycle, save, and reuse energy from knee and ankle joints. Their development provided a new method for designing an energy-efficient exoskeleton.
Since humans consume more energy than needed for walking, the redundant part is wasted. The researchers hypothesized that this energy could be recycled and released to help in people’s forward movement. It would significantly reduce the energy used by the exoskeleton.
Their designed exoskeleton would recycle the energy wasted in certain phases of movement through the knee and ankle joint, to provide forward motion. The use of torsion springs stores the energy, with mechanisms to control the charge/discharge cycle throughout the walking cycle. Their results showed that the ratio of energy released at push-off to recycled energy from knee and ankles joints exceeds 75%.

Figure 4: the joint power during human walking and mechanical design of the quasi-passive exoskeleton.
Tsinghua University graduate students Yihua Chang and Weixin Wang were the co-first authors, with Professor Chenglong Fu as the corresponding author of the paper.
All four papers received support in part from the National Key R&D Program of China, the National Natural Science Foundation of China, the Guangdong Innovative and Entrepreneurial Research Team Program, the Shenzhen and Hong Kong Innovation Circle Project, and the Centers for Mechanical Engineering Research and Education at MIT and SUSTech.
Related paper links:
IEEE Transactions on Cybernetics: https://ieeexplore.ieee.org/document/9042836
IEEE Transactions on Neural Systems and Rehabilitation Engineering: https://ieeexplore.ieee.org/document/8960271
Mechanism and Machine Theory: https://doi.org/10.1016/j.mechmachtheory.2019.103738
ASME Journal of Mechanisms and Robotics: https://doi.org/10.1115/1.4046835
Proofread ByYingying XIA
Photo ByDepartment of Mechanical and Energy Engineering, Yan QIU






