As an emerging promising attachment technique, electrostatic adhesion has been extensively applied in soft robots, flying vehicles, wearable devices, grippers, and aerospace applications. Usually, it is composed of a conductive pad and an electroadhesive pad (EPad) consisting of a conductive layer covered by insulation, as shown in Figure 1a. Supplied with a high voltage, dislike charges induced in the conductive layer and the conductive pad generate attractive force.
Nevertheless, the EPad suffers from unpredictable electrical breakdown due to defects in dielectric layers, which severely limits its practical applications. Once a short circuit happens accidentally, the whole device fails suddenly and cannot recover. In practice, to avoid electrical breakdown, the voltage is restricted to a magnitude much lower than the threshold acquired from tests and theories, which results in a much lower output force.

Associate Professor Hongqiang Wang’s research group from the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech) has recently published a paper about the self-clearing mechanism for electrostatic actuation. By simply thinning the conductive layer, the EPad can survive defect-driven premature unrecoverable breakdown damage and prolong the lifetime of EPads.
Their study, entitled “Strong Reliable Electrostatic Actuation Based on Self-Clearing Using a Thin Conductive Layer,” was published in Soft Robotics, a leading robotics journal.
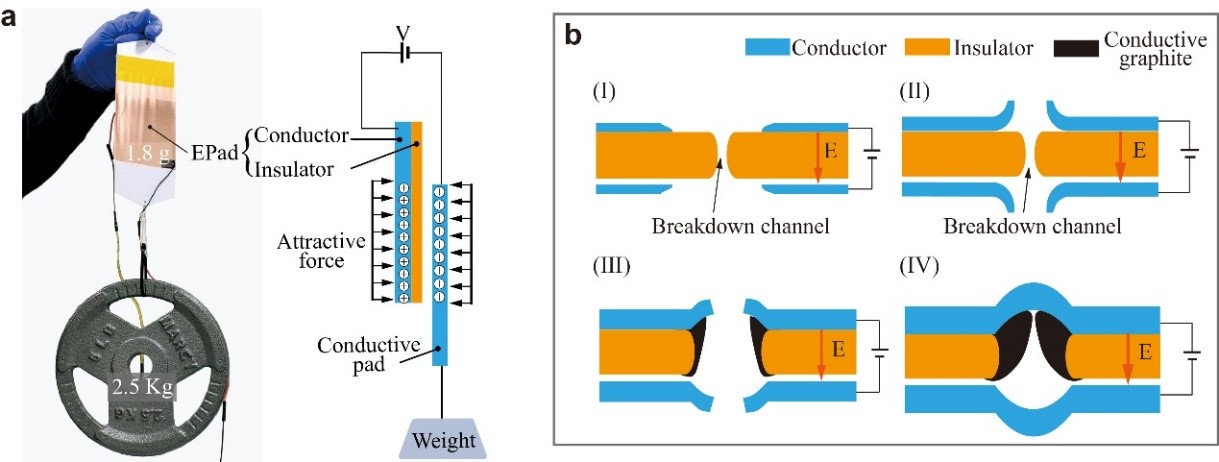
Figure 1. (a) The principle of electrostatic adhesion. (b) Four self-clearing hypothesis modes.
A thinner conductive layer in an EPad allows the arc energy during discharge to be adequate to evaporate and deform the local electrode. Therefore, four self-clearing modes to explain the different self-clearing phenomena were proposed (Fig. 1b). When the conductive layer is thin enough (e.g., < 7 μm for copper), a successful self-clearing occurs, the current decreases drastically to <0.1mA in 150 μs, and simultaneously the voltage recovers back to the regular magnitude (Fig. 2a). After multiple self-clearing, the maximum breakdown voltage increases by 260% at maximum, as shown in Fig. 2b.
When the insulator thickness is merely 2.5 μm, the lateral force after clearing drops by 20% (Fig. 2c). In contrast, the force decrease is <1% for the insulation with a thickness of 5 or 7 μm. In addition, the robustness and repeatability of the self-clearing mechanism are validated by surviving consecutive breakdowns and self-clearing of 173 times during 65 min.
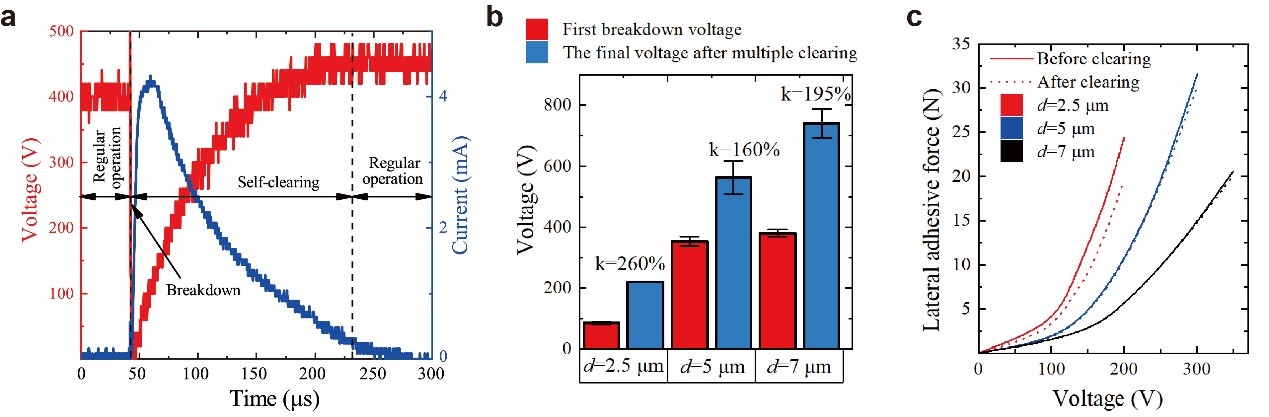
Figure 2. (a) The electrical performance response of a successful self-clearing. (b) Maximum voltages before and after multiple self-clearing. (c) The lateral electrostatic adhesive force before and after self-clearing.
To demonstrate the stability and reliability of the self-clearing mechanism for applications in electrostatic adhesion, suffering penetration, punching, and cutting, the EPad survived with the self-clearing mechanism. The clearing process completes so quickly, and it takes little effect on the regular operation of electrostatic adhesion. Finally, the researchers demonstrated the applications of self-cleaning with a more practical scenario of pick and place. With self-clearing, the grippers survived an increased operating voltage (from 1500 to 2000 V), resulting in slight fluctuation in the gripping and transferring process (Fig. 3).
The self-clearing mechanism by Prof. Wang’s research group enables more practical and extensive applications on EPads, such as gripping and clutching, and benefits other electrostatic-based actuations, such as dielectric elastomer actuators and piezoelectric polymer actuators in the future.
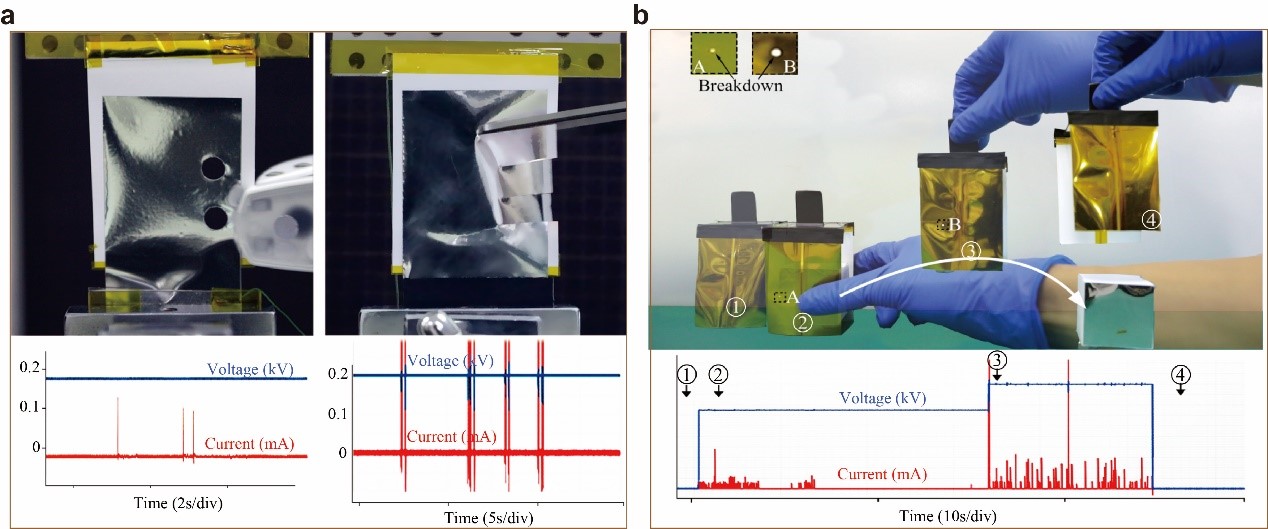
Figure 3. (a) The electrostatic clutch surviving severe physical damages, including punching and cutting. (b) An electrostatic gripper completing a pick-and-place task with self-clearing.
Guoying Xie, a visiting student at SUSTech, and Dongliang Fan, a Ph.D. student in Assoc. Prof. Hongqiang Wang’s research group, are the co-first authors of this paper. Assoc. Prof. Hongqiang Wang is the corresponding author, and SUSTech is the first affiliation.
This work was supported by the National Key R&D Program of China, National Natural Science Foundation of China (NSFC), Science, Technology and Innovation Commission of Shenzhen Municipality, and Southern Marine Science and Engineering Guangdong Laboratory (Guangzhou).
Paper link: https://www.liebertpub.com/doi/abs/10.1089/soro.2022.0132
To read all stories about SUSTech science, subscribe to the monthly SUSTech Newsletter.
Proofread ByAdrian Cremin, Yingying XIA
Photo By