In the past decade, ionotronics, which are devices based on the synergistic interaction between ions and electrons, have attracted increasing attention due to their inherent flexibility, stretchability, optical transparency, and biocompatibility. However, existing ionotronic sensors suffer from poor stability and limited sensing capabilities due to their simple device structures and susceptibility to leakage, which greatly hinders their practical applications. Therefore, the design and manufacture of ionotronic sensors with stable performance and multi-mode sensing capabilities hold significant engineering value.

Assistant Professor Canhui Yang’s group from the Department of Mechanics and Aerospace Engineering (MAE) and Associate Professor Qi Ge’s group from the Department of Mechanical and Energy Engineering (MEE) at the Southern University of Science and Technology (SUSTech) recently collaborated in the research of integrated design and fabrication of ionotronic sensors based on polyelectrolyte elastomers using multi-material digital light processing 3D printing technology. This study simultaneously resolves the deficiencies of stability and functionalities in traditional ionotronic sensors, providing a new solution for the design, fabrication, and application of stretchable ionotronic sensors.
Their work, entitled “Polyelectrolyte elastomer-based ionotronic sensors with multi-mode sensing capabilities via multi-material 3D printing”, has been published in Nature Communications, a multidisciplinary journal dedicated to all areas of the biological, health, physical, chemical, Earth, social, mathematical, applied, and engineering sciences.
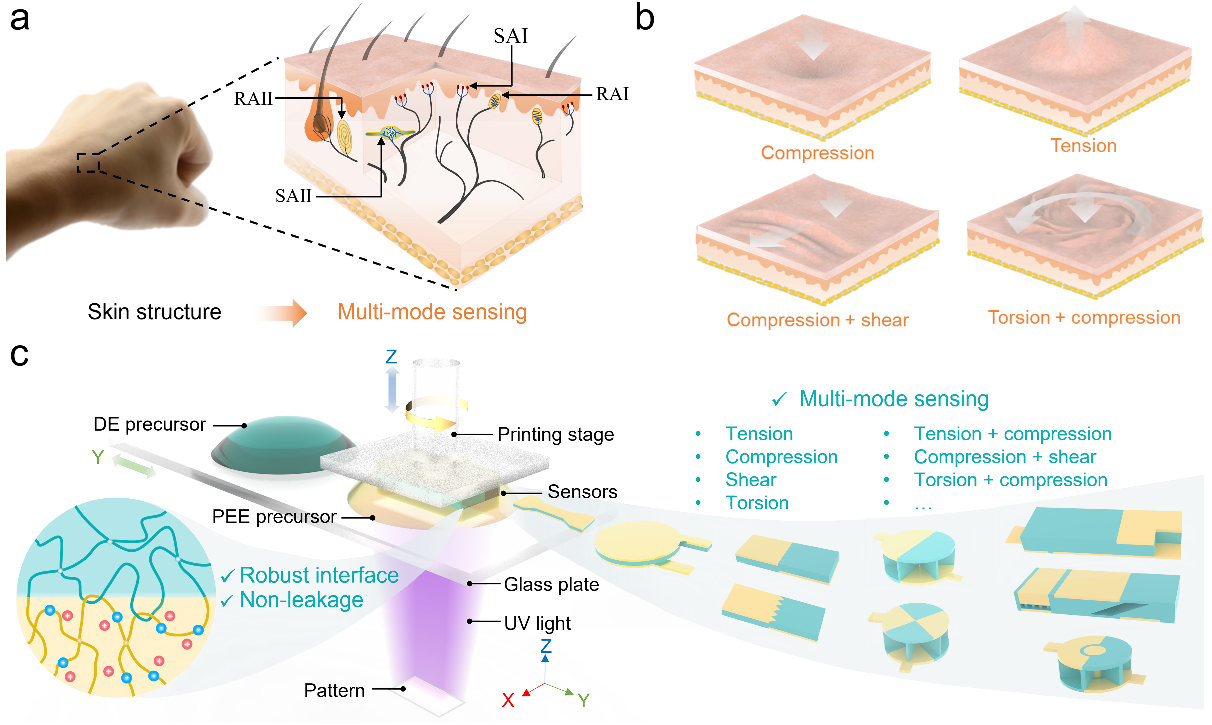
Figure 1. Skin-mimicked ionotronic sensors with multi-mode sensing capabilities. (a) Schematic of the human skin containing various mechanoreceptors. (b) Human skin is capable of multi-mode sensing, such as compression, tension, combined compression and shear, and combined torsion and compression. (c) 3D printing of various architected ionotronic sensors for multi-mode sensing using polyelectrolyte elastomers with robust interfaces and without leakage.
As illustrated in Figure 1, inspired by the multimodal perception capabilities of human skin in sensing external forces such as tension, compression, torsion, and their combinations, the researchers utilized a multi-material digital light processing (DLP) 3D printing technique to fabricate ionotronic sensors with multi-mode sensing capabilities. The sensor employed polyelectrolyte elastomer (PEE), which consists of a polymer network with fixed anions or cations and mobile counterions, ensuring resistance to ion leakage. During the printing process, a robust interface between PEE and DE is generated owing to the covalent and topological interlinks formed during the printing.
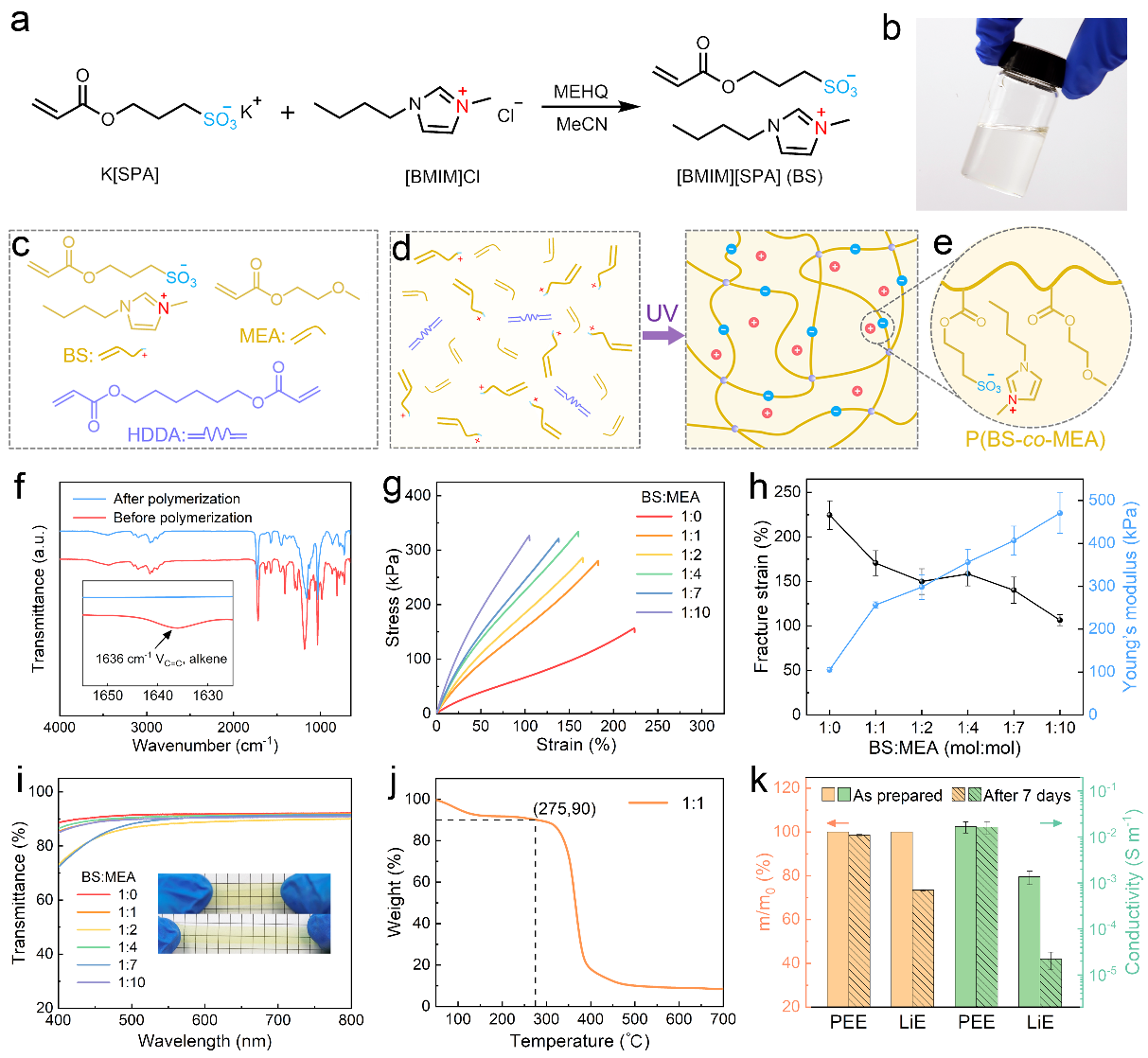
Figure 2. Synthesis and characterizations of PEE, including optical, mechanical, and electrical properties.
The researchers first synthesized a monomer called 1-butyl-3-methylimidazolium 3-sulfopropyl acrylate (BS) as one of the constituent materials of the polyelectrolyte and copolymerized it with another hydrophobic monomer named MEA. By optimizing the proportion of BS and MEA, a balance between the mechanical and electrical properties of the polyelectrolyte material was achieved, thereby optimizing the performance of the sensor, as shown in Figure 2.
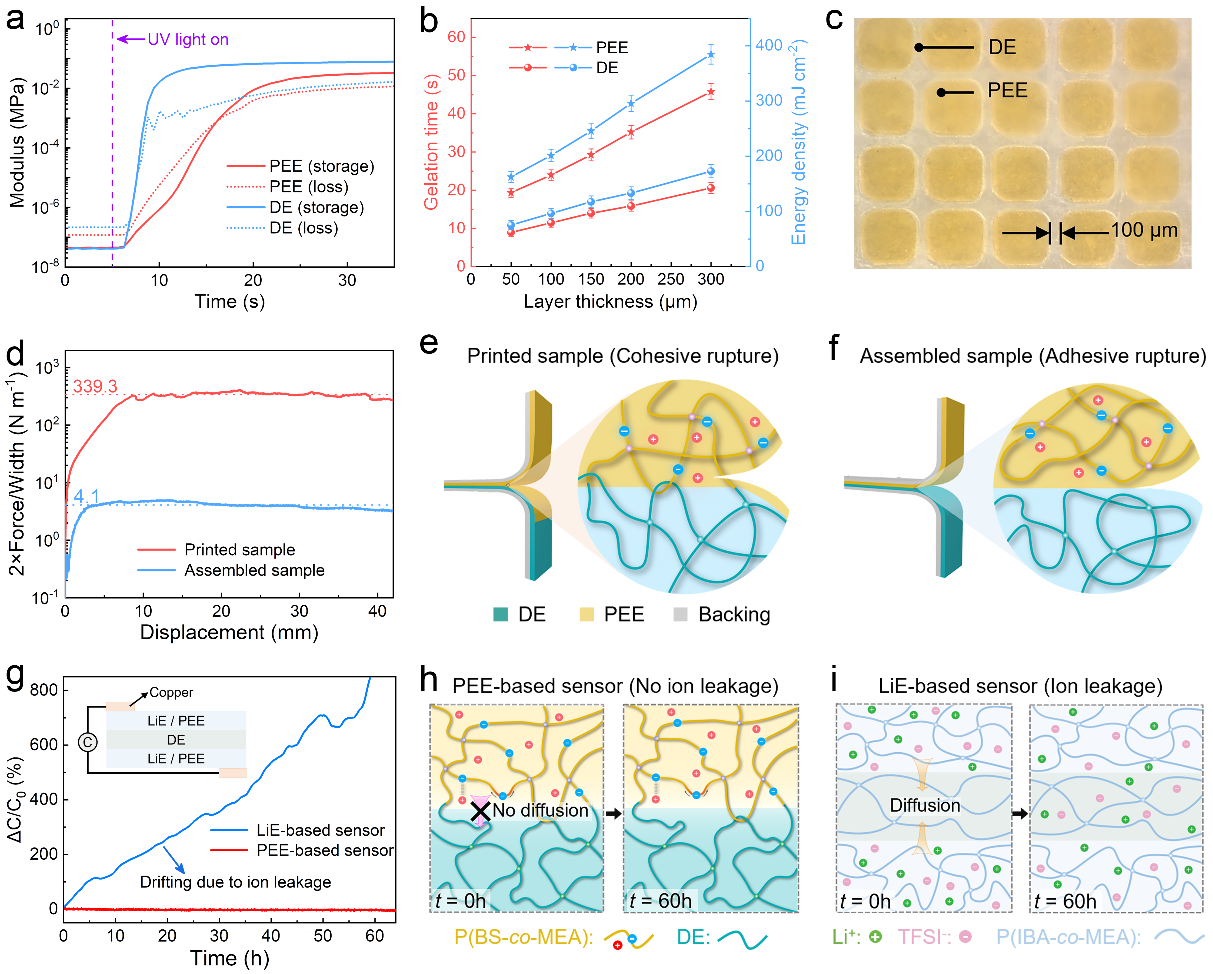
Figure 3. Characterizations of printing and printed ionotronic sensors. (a) Storage modulus and loss modulus of PEE and DE vary with time. (b) The variations of gelation time and energy density with layer thickness for PEE and DE. The error bars represent standard deviations. (c) Microscopic image of a PEE and DE grid pattern. The width of the grid is 100 μm, and the length of the square is 500 μm. (d) 180° peeling curves for 3D-printed (red) and manually assembled (blue) PEE/DE bilayers. Schematics showing (e) the cohesive rupture of printed PEE/DE bilayer, and (f) the adhesive rupture of assembled PEE/DE bilayer. g Variation of ΔC/C0 with time for PEE-based sensor and LiE-based sensor. Schematics illustrating (h) the prohibition of ion leakage in PEE-based sensor, and (i) the ion leakage in LiE-based sensor.
The printability of the developed PEE material was validated through rheological testing (Figure 3). Subsequently, the interface bonding strength of the PEE/DE bilayer structures, both 3D printed and manually assembled, was measured using a 180° peel test. The results indicate that the 3D-printed bilayer structure exhibits a strong and tough interface due to the formation of covalent bonds and topological entanglement between PEE and DE.
During the peel process, the PEE material undergoes cohesive fracture, resulting in a bonding energy of 339.3 J m-2. In contrast, the interface of the manually assembled PEE/DE bilayer structure is weak, leading to interfacial fracture during the peel process and a bonding energy of only 4.1 J m-2. In durability testing, the capacitive sensors based on PEE demonstrate long-term stability of the signal because PEE is resistant to ion leakage. On the other hand, the sensors based on traditional LiTFSI-based ion-elastomers experience signal drift and eventual short-circuiting due to ion leakage.
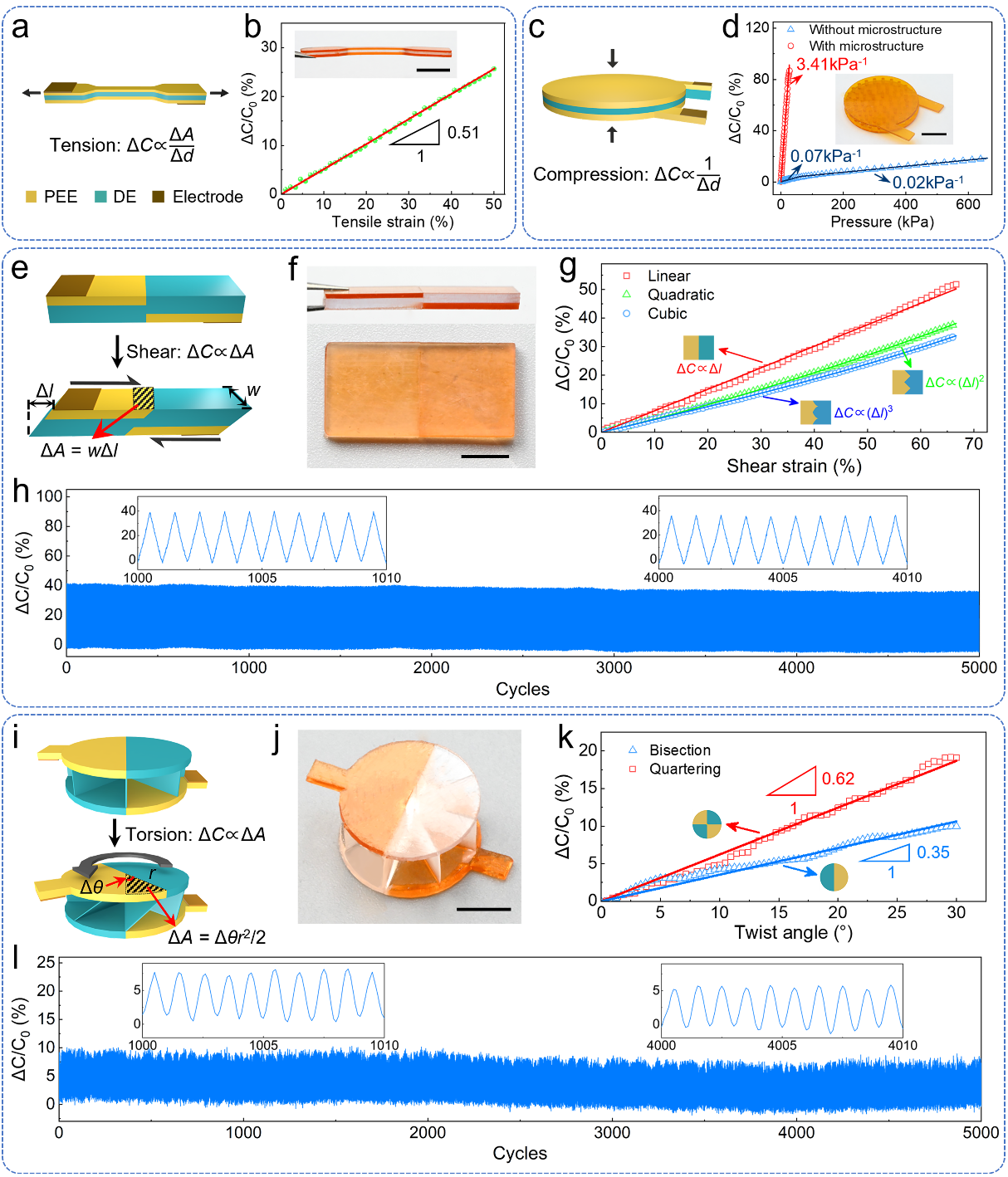
Figure 4. Ionotronic sensors for tension, compression, shear, and torsion. (a) Structure and principle of the tensile sensor. (b) Variation of ΔC/C0 with tensile strain. (c) Structure and principle of the compressive sensor. (d) Variations of ΔC/C0 with pressure for the compressive sensors with/without microstructures. (e) Structure and principle of the shear sensor. (f) Snapshot images of a shear sensor. (g) Variation of ΔC/C0 with shear strain for the shear sensors with different profiles. (h) Cyclic shear test (i) Structure and principle of the torsional sensor. (j) Snapshot image of a torsional sensor. (k) Variation of ΔC/C0 with the angle of twist for the torsional sensors with different profiles. (l) Variation of ΔC/C0 with the angle of twist for the torsional sensors with different profiles.
The 3D printing technology provides great flexibility for the structural design of devices. As shown in Figure 4, the researchers designed and integrated four different types of stretchable, compressible, shear, and torsional ionotronic sensors using 3D printing. All the devices exhibited excellent performance and stability. Particularly, through the structural design of the devices, the sensitivity of the sensors can be significantly optimized. For example, introducing microstructures in the dielectric elastomer layer of the compressible sensor can enhance the sensitivity by two orders of magnitude. The sensitivity of the sensors can also be selectively modulated by designing the contour line of the shear sensor or the number of fan-shaped regions in the torsional sensor.

Figure 5. Integrated ionotronic sensors. (a) Schematic and (b) Snapshot image of the integrated tensile and compressive sensor. (c) Equivalent circuit diagram of the sensor. (d) Device signal when the compressive unit or the tensile unit is activated. Responses of the sensor subjected to 10 cycles of (e) compression, and (f) tension. (g) The signal maps under the combined deformation. (h) Schematic and (i) Snapshot image of the integrated compressive and shear sensor. (j) Equivalent circuit diagram of the sensor. (k) Device signal when the compressive unit or the shear unit is activated. (l) Schematic and (m) Snapshot image of the integrated torsional and compressive sensor (n) Equivalent circuit diagram of the sensor. (o) Device signal when the compressive unit or the torsional unit is activated.
Furthermore, the researchers designed and integrated three combination-type ionotronic sensors, including tensile-compression, compression-shear, and compression-torsion sensors (Figure 5). One of the major challenges in combination-type sensors is the signal crosstalk between different sensing channels. For instance, when the device is under tension, the Poisson effect of the material causes a decrease in the geometric dimensions in the vertical direction, resulting in equivalent compressive deformation and changes in the signal of the compression channel due to tensile excitation. By combining finite element simulation analysis with appropriate device structural designs, they effectively mitigated the signal crosstalk between different channels.

Figure 6. Printed wearable wireless remote-control unit for a drone (a) The block diagram of a controller system for a drone. (b) Schematics of the operation modes of the shear sensors and the compressive sensor. (c) Working mechanism of the shear sensor. (d) Capacitances of five sensors vary with the testing cycle (e) The coding of the remote-control unit. (f) Real-time responses of five sensors (g) Sequential snapshots of a drone under the commands of the remote-control unit.
Video 1. Remote-control system for a drone. The remote-control unit is worn on the hand back. When the sensors of C1, C2, C4, C5 + C2, C4, and C3 are activated sequentially, the drone flies according to the corresponding orders of “up”, “left”, “right”, “flip to the left”, “right”, and “down”.
Finally, the researchers demonstrated a wearable remote-control unit composed of four shear sensors and one compressive sensor, as shown in Figure 6. This unit was connected to a remote control system for wireless drone flight control. The four shear sensors in the wearable unit sensed finger movements to control the drone’s direction, while the compressive sensor detected finger pressure to control the roll of the drone. This design of the wearable remote-control unit enables human-machine interaction and provides a more flexible control method.
Research Assistant Caicong Li from the Department of MAE (now a Ph.D. student at the Hong Kong University of Science and Technology (Guangzhou)), and Ph.D. students Jianxiang Cheng and Yunfeng He from the Departments of MEE and MAE, respectively, are the co-first authors of this paper. Assistant Professor Canhui Yang and Associate Professor Qi Ge are the co-corresponding authors.
Collaborating authors include Ph.D. student Xiangnan He from the Department of MEE and Research Assistant Ziyi Xu from the Department of MAE (now a Ph.D. student at Lanzhou University). SUSTech is the sole affiliation of the paper.
This research was supported by the Shenzhen Key Laboratory of Soft Matter Mechanics and Intelligent Manufacturing and the Natural Science Foundation of Guangdong Province.
Paper link: https://www.nature.com/articles/s41467-023-40583-5
To read all stories about SUSTech science, subscribe to the monthly SUSTech Newsletter.
Proofread ByAdrian Cremin, Yingying XIA
Photo By






