Unlike traditional active origami made from assembled responsive materials, 4D printing allows for the integrated formation of active origami without sensitivity to the complexity of crease layouts and material distribution. Previous works have successfully created active origami through 4D printing using shape memory polymers (SMPs) and shape memory composites with functional fillers. However, these active origamis typically can only transition between two states (the temporary shape and the permanent shape).
Research on process control for shape-shifting of 4D printed active origami has not yet been conducted, and there is still a gap in the multi-physics modeling of its highly nonlinear deployment process, leaving vast unexplored configurations and untapped potential. Additionally, the inherent low stiffness characteristics of responsive materials also restrict the practical engineering applications of 4D-printed active origami.

A joint team led by Assistant Professor Yi Xiong from the School of System Design and Intelligent Manufacturing and Professor Qi Ge from the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech) has proposed a precise deployment control strategy for 4D printed continuous fiber-reinforced origami composites, aiming to construct high-performance active origami structures whose properties can be modulated on-demand for multi-scenario and multi-task applications.
Their paper, entitled “Electrothermally controlled origami fabricated by 4D printing of continuous fiber-reinforced composites”, has been published in Nature Communications.
The research focused on active origami deployable structures, fully exploring the potential of emerging fiber composite additive manufacturing technologies. By ingeniously leveraging the high strength, electrical conductivity, and excellent thermal properties of continuous carbon fibers, the team achieved “three birds with one stone” in structural design. They also proposed an electrical control strategy for intelligent composite material, which is based on multi-physics simulation models involving electrical, thermal, and mechanical aspects. Ultimately, they developed a novel high-performance electrothermally controlled origami with high load-bearing capacity, reconfigurability, and spatiotemporal controllability. Their work enriches the integrated theory and methods of active origami design, manufacturing, and control, providing innovative pathways for the development of new metamaterial structures, multimodal robots, and intelligent morphing aircraft.
Based on continuous fiber-reinforced composite 3D printing technology, the team achieved the manufacturing of continuous carbon fiber-reinforced origami composite by designing the spatial layout of fibers. Continuous carbon fibers were printed on the hinges for electrical heating activation. By manipulating the time of the current, the electrothermally controlled origami could be locked into any configuration. The incorporation of continuous carbon fibers significantly improved the mechanical performance of the origami, especially the enhancement in the rubbery state, with the modulus increasing from 2.0 MPa to 2.3 GPa.
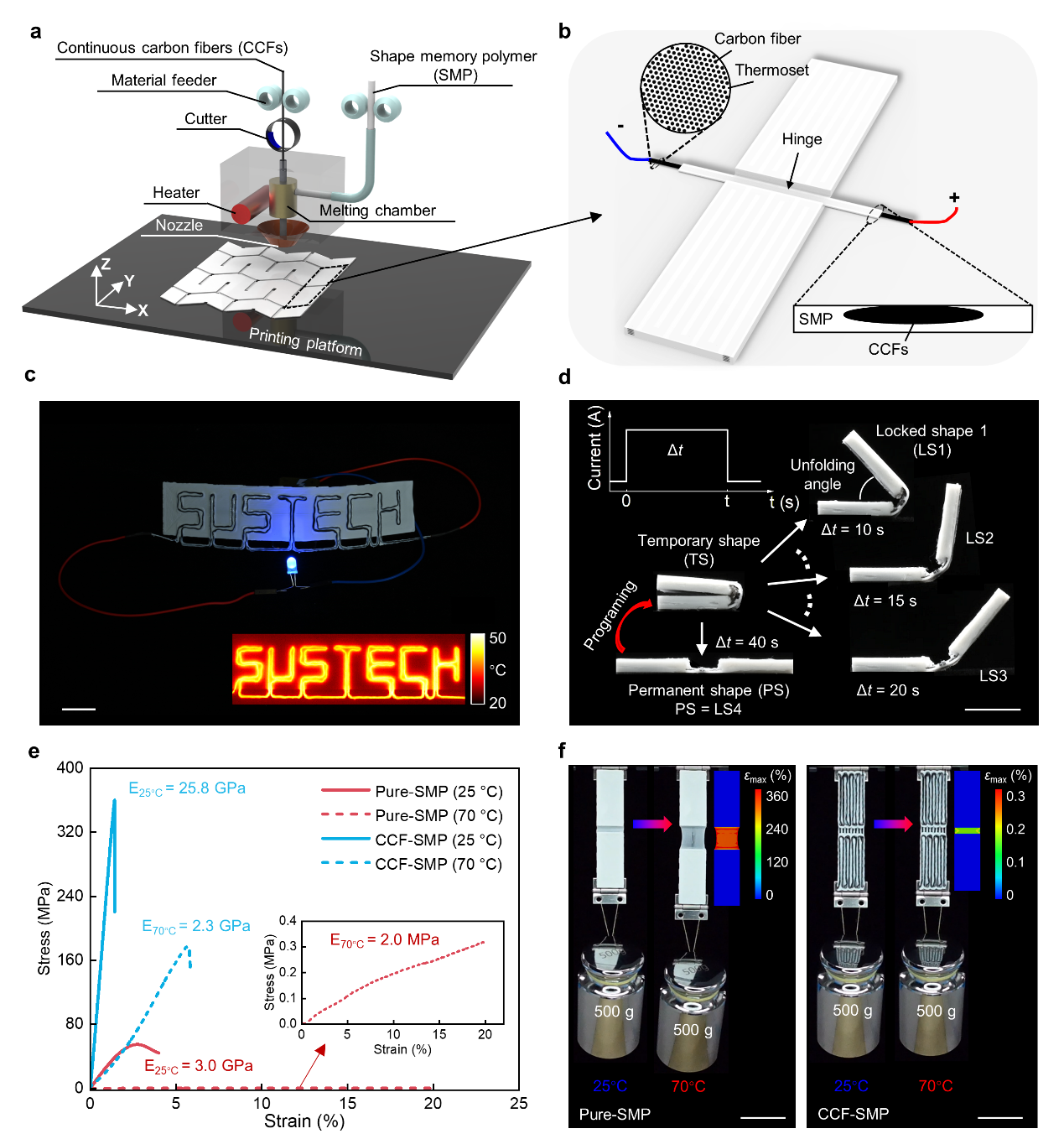
Figure 1. Electrothermally controlled origami printed by multifunctional continuous carbon fiber-reinforced shape memory polymer 3D printing technology
As illustrated in Figure 2, continuous carbon fibers play three roles in electrothermally controlled origami. Fibers in the stiff panels and hinges are used for reinforcement, fibers in the hinges are used for heat conduction, and fibers on the hinges are used for localized Joule heating. This electrothermally controlled origami can rapidly heat up to above the glass transition temperature of the material within 20 seconds under an applied current of 0.22 A. The incorporation of fibers significantly improves the uniformity of thermal distribution at the hinges, ensuring higher shape recovery rates, faster shape recovery speeds, and greater shape recovery forces for the electrothermally controlled origami.
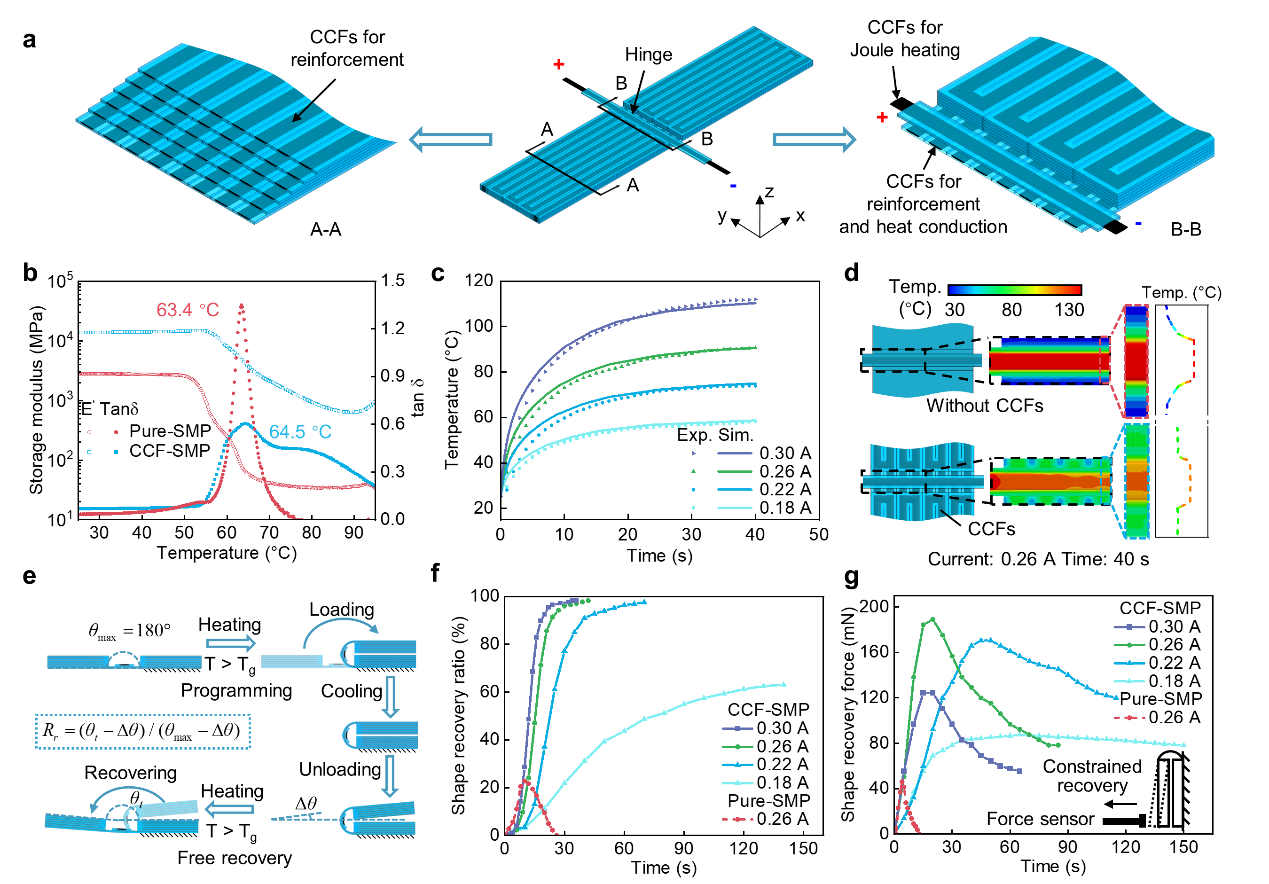
Figure 2. Heating and shape recovery performance of the shape memory composite
To investigate the effect of electrical heating time on the shape-shifting behavior of electrothermally controlled origami, the researchers established a multi-physics simulation model involving electrical, thermal, and mechanical aspects. They validated the effectiveness of the model through experiments (Figure 3). Through simulation, a guiding model was established correlating different target unfolding angles with corresponding heating times. An example using origami in the shape of an airplane was demonstrated to exhibit a deployment process with complex deploying routines. This airplane-shaped origami can achieve spatiotemporal control, including localized control, unfolding angle control, and sequence control.
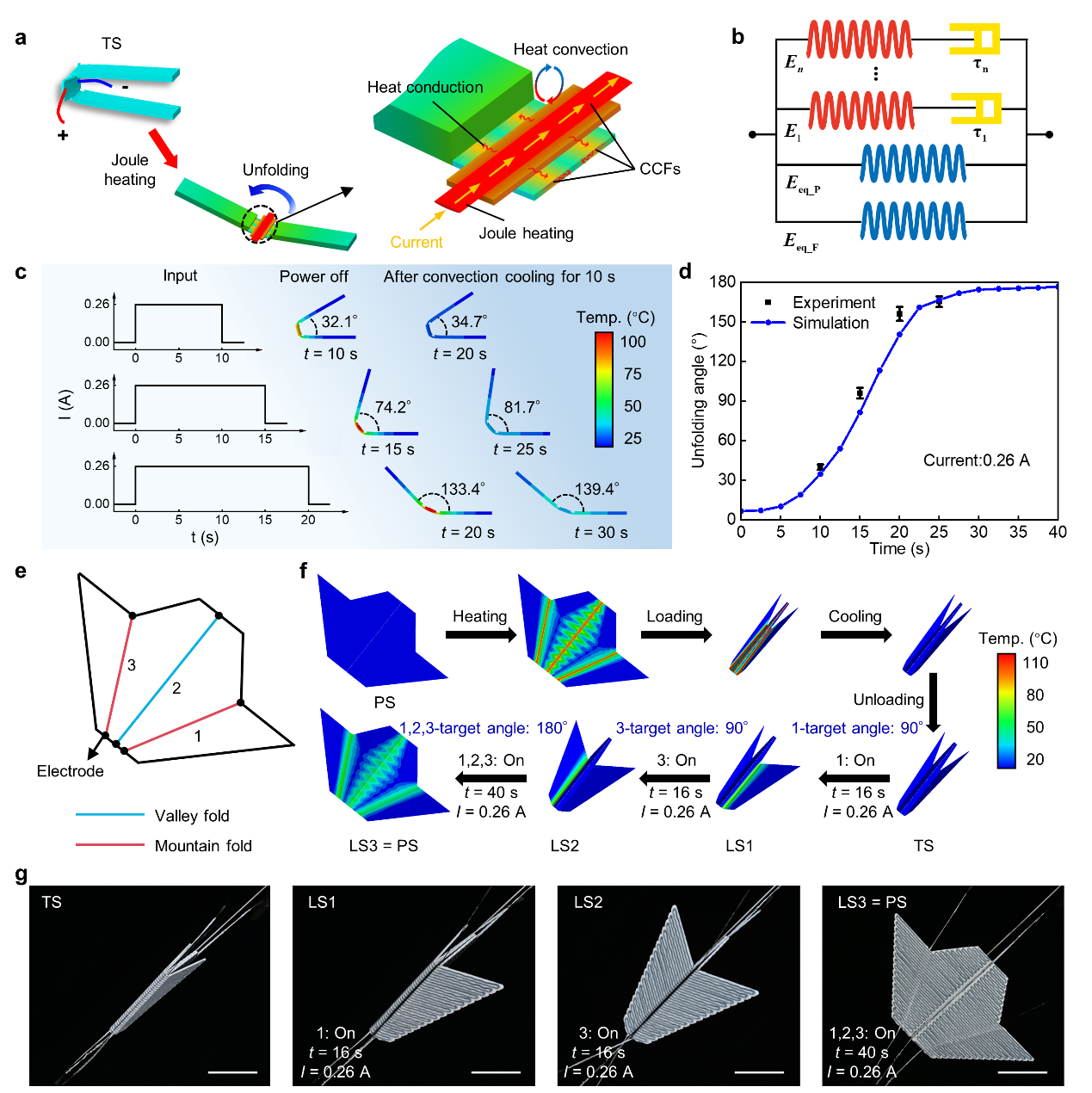
Figure 3. Precisely control of electrothermal origami realized by FEA and experiment
Precise control of electrothermally controlled origami enables reconfigurability (Figure 4). Guided by a multi-physics model, by applying diverse electrical inputs, one origami strip can be deployed into various configurations, including single-layer, multi-layer, and metamaterial unit configurations. Additionally, control of the actuation sequence for the origami strip structure can provide additional functionalities, i.e., grasping.
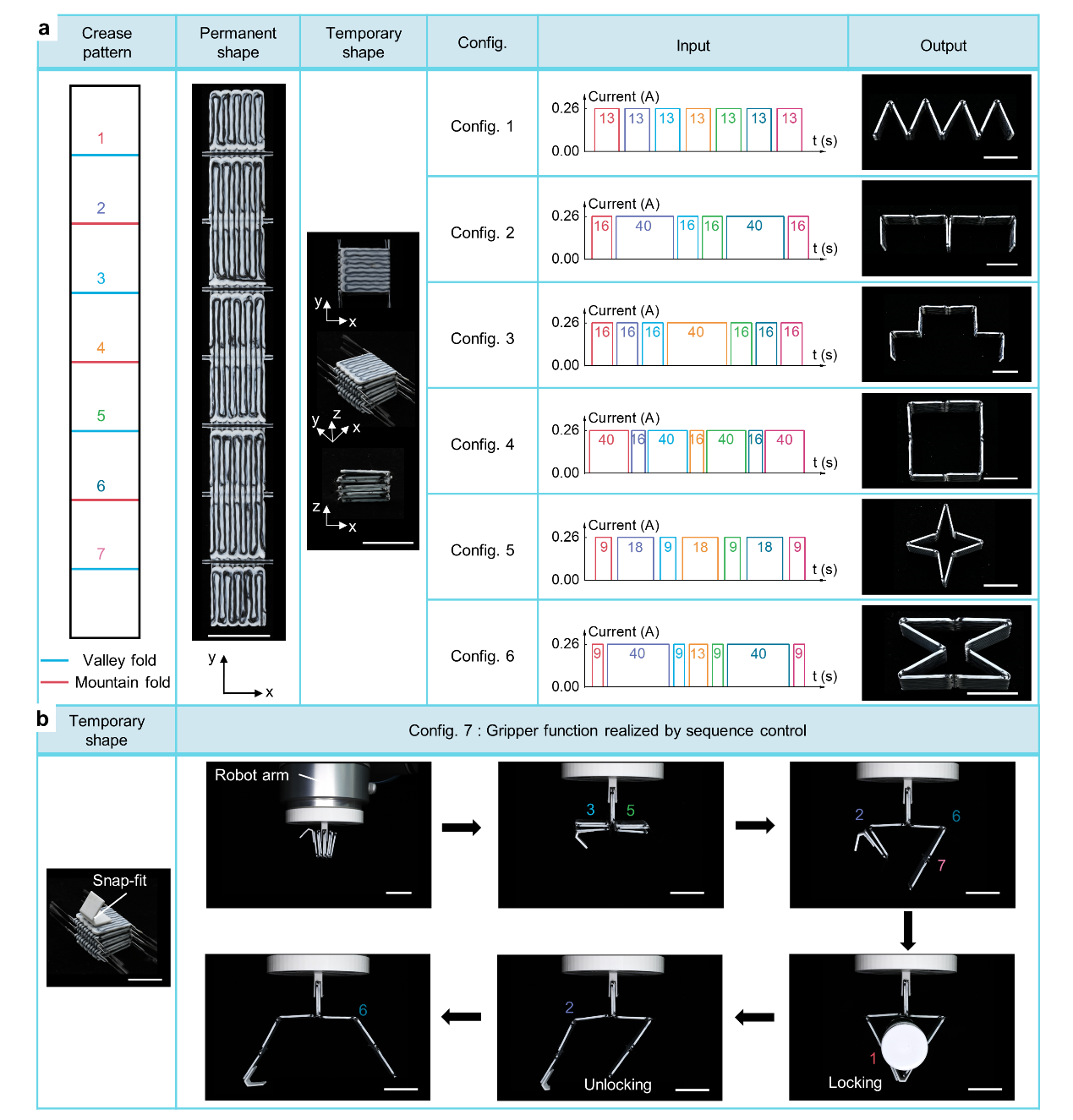
Figure 4. Reconfigurability of the electrothermally controlled origami
The reconfigurable characteristics of precisely controlled electrothermally controlled origami enable the design of Miura-origami with adjustable mechanical properties by manipulating the activation parameters (Figure 5). Different three-dimensional configurations can be obtained by varying the heating time, and each configuration possesses distinct mechanical properties. Notably, the structural stiffness can be varied by an order of magnitude.
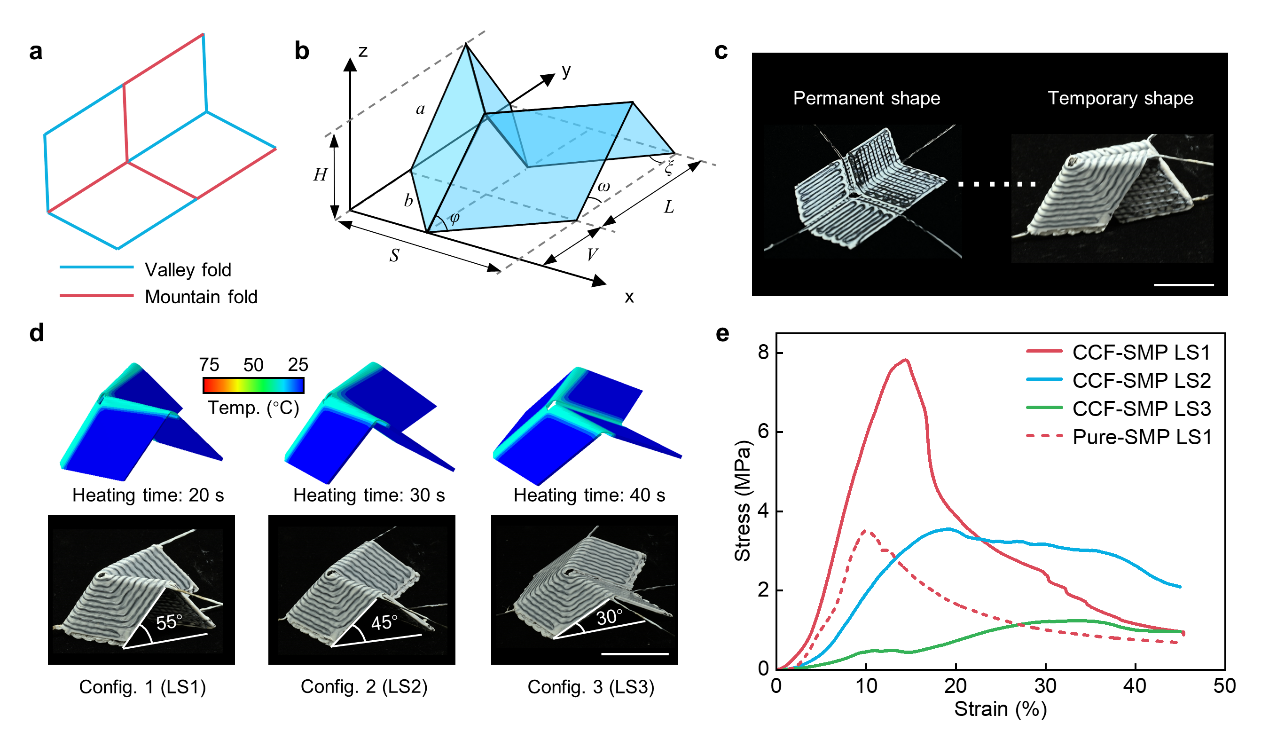
Figure 5. Precisely controlled electrothermal origami with tunable mechanical properties
As shown in Figure 6, the assembly of Miura unit cells with adjustable mechanical properties enables the construction of combinatory digital architected materials. Their mechanical performance can be programmed to produce non-uniform deformation regions based on structural design. Through structural design and electrothermal control, customized mechanical behaviors such as multi-stage and quasi-zero stiffness behaviors can be achieved.
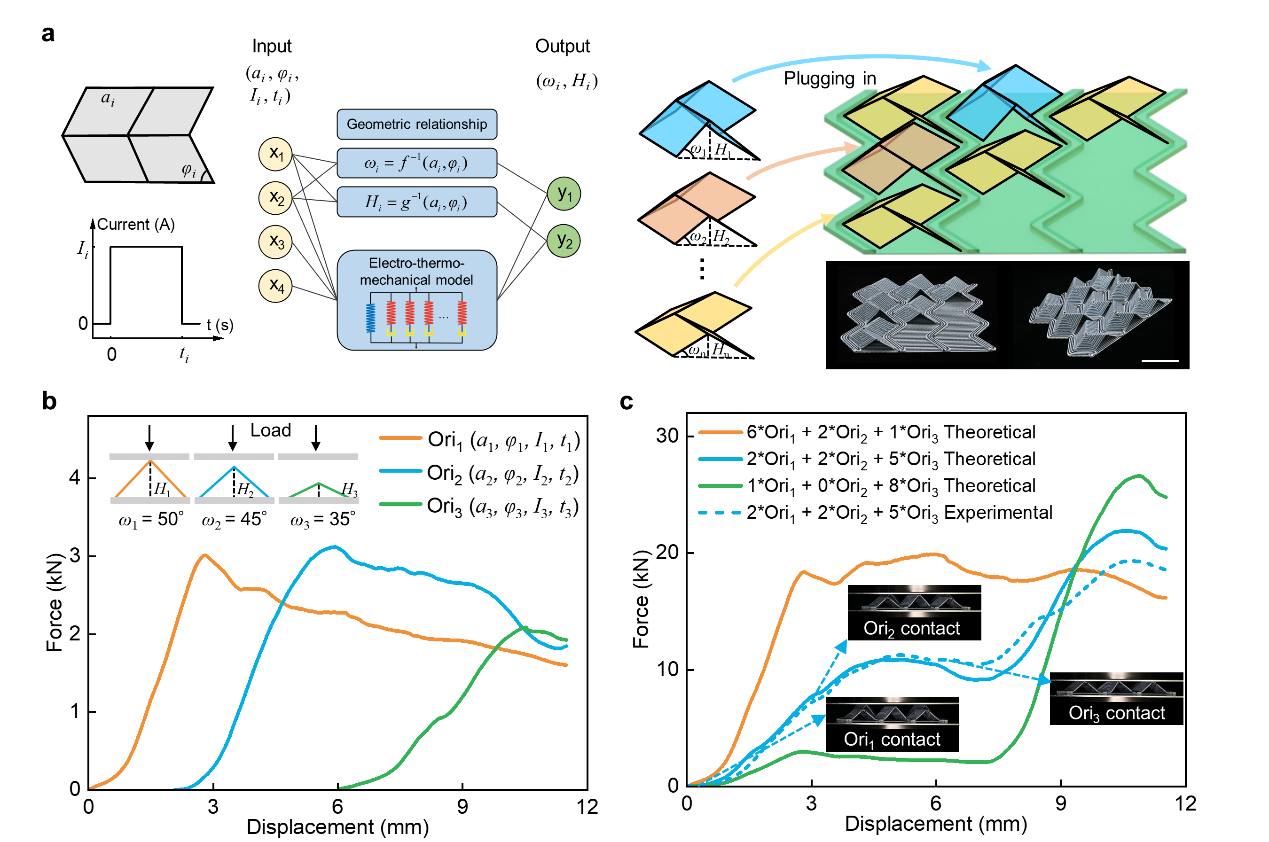
Figure 6. Programmable mechanical response of an array of Miura-origami structures
The spatiotemporal controllability of precisely controlled electrothermal origami also allows for the design of a variable thickness wing with reconfigurable geometry and inversely designable airfoil for multiple flight scenarios by combining the deployable Miura-origami units with different geometry designs (Figure 7).
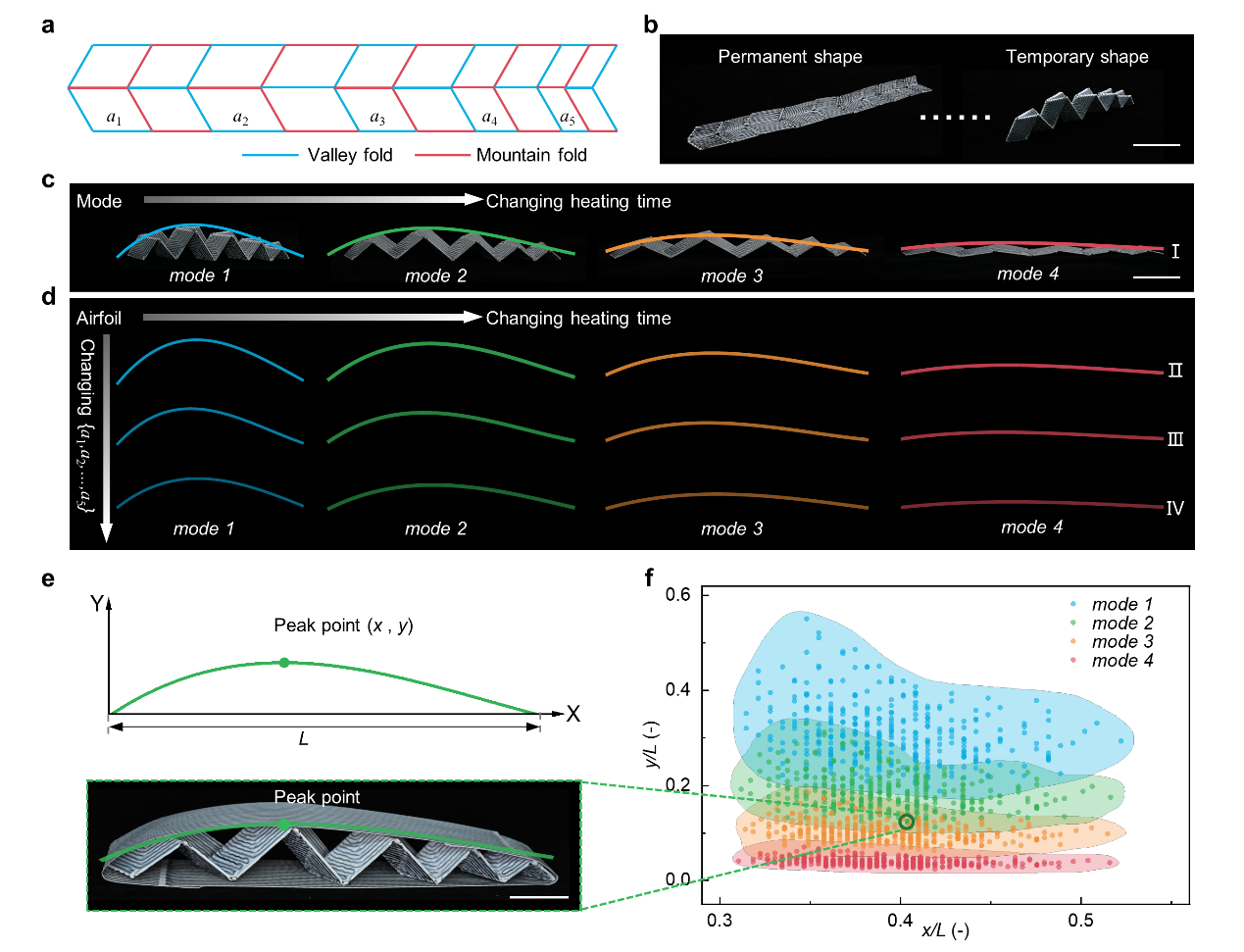
Figure 7. Design of variable thickness wing
Yaohui Wang, a Ph.D. candidate of SUSTech, and Haitao Ye, a joint Ph.D. candidate of SUSTech and City University of Hong Kong (CityU), are the co-first authors of this paper. Assistant Professor Yi Xiong and Professor Qi Ge of SUSTech are the co-corresponding authors, and SUSTech is the first affiliated unit.
This study was supported by the National Natural Science Foundation of China (NSFC), Guangdong Basic and Applied Basic Research Foundation, Shenzhen Science and Technology Innovation Commission, and the Key Talent Recruitment Program of Guangdong Province. The authors also acknowledge the assistance of the SUSTech Core Research Facilities.
Paper link: https://doi.org/10.1038/s41467-024-46591-3
To read all stories about SUSTech science, subscribe to the monthly SUSTech Newsletter.
Proofread ByAdrian Cremin, Yingying XIA
Photo By






