Virtual reality (VR) is an emerging technology that has been attractive in both industry and academia for vast applications, including entertainment, manufacturing, healthcare, education, and the metaverse. The common VR devices include VR glasses and VR gloves, with most VR gloves only having the ability to collect data with haptic feedback.
However, as an essential sense for humans to perceive the environment, haptic is an important way to improve the immersion and authenticity of VR. Based on this, many researchers are working on haptic devices, but the existing haptic gloves have been seriously restricted in their practical application because of the limitations of system complexity, large weight, expensive cost, high energy consumption, etc.
Recently, electrostatic adhesive technology has emerged in the field of exoskeleton robots, micro-robot, wall-climbing robots, and so on. However, there are still some problems in electrostatic adhesive technology that limits its application prospect, such as the difficulty in controlling the force and high actuation voltage.

Associate Professor Hongqiang Wang’s research group from the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech) has recently published a paper about VR haptic gloves based on electrostatic adhesive force.
Their research, entitled “So-EAGlove: VR Haptic Glove Rendering Softness Sensation with Force-tunable Electrostatic Adhesive Brakes,” was published in IEEE Transactions on Robotics (T-RO), through building a feedforward control model applied in So-EAGlove to quickly generate an accurate force to follow the force-displacement profile of the corresponding real objects.
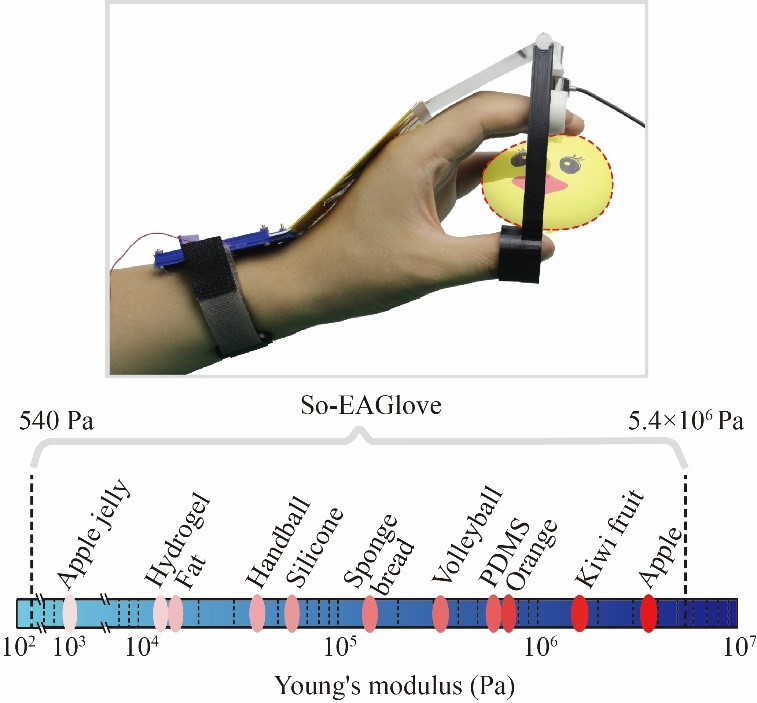
Figure 1. So-EAGlove and the large range of objects and materials that could be simulated by it
The main goal of the study was to achieve accurate and fast control of electrostatic adhesive force by superposition feedback, and to develop a lightweight, low energy consumption, and low-cost haptic feedback VR glove. The researchers effectively improved the accuracy of the previous open-loop control and the response speed based on the proposed control method. Furthermore, they calculated the trend of contact force by the Hertz contact force model to control the electrostatic adhesive force to follow the theoretical contact force, and simulate the haptic feedback of grasping different objects by human hands. The So-EAGlove weighs only 51 grams and consumes about 2.43mW.
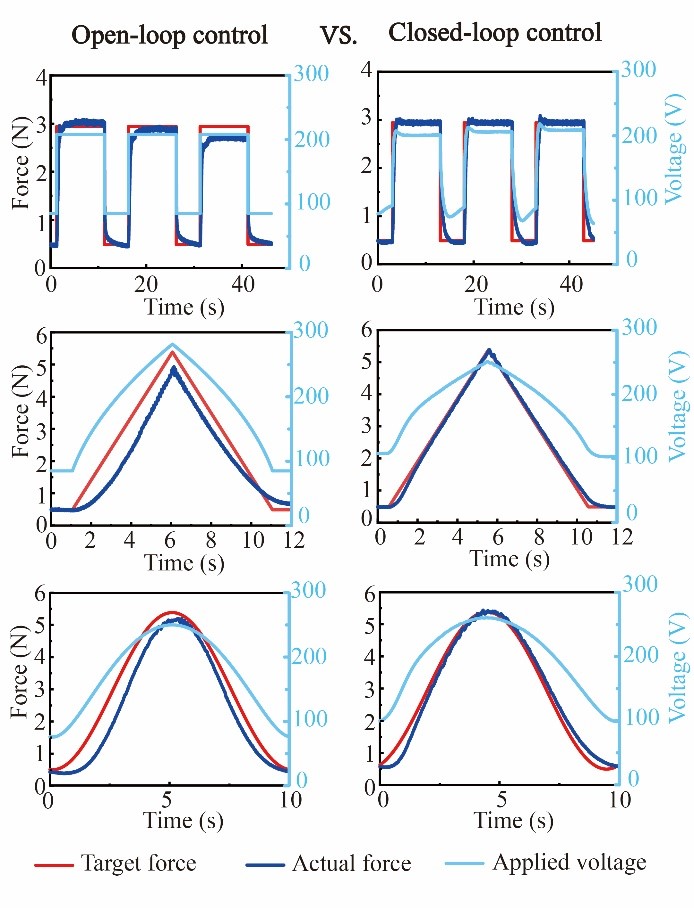
Figure 2. The accurate control of electrostatic adhesive force by the proposed control model

Figure 3. The fast control of electrostatic adhesive force by the proposed control model
Prof. Wang’s team also conducted a system experiment to let participants wear the haptic gloves. Through the tactile feedback gloves, they could accurately perceive the different stiffness of the simulation objects, and the accuracy reached up to 90%. In the realism test, there were no significant differences between the effect of the haptic feedback produced by the So-EAGlove and the real objects. This research found an effective solution for accurate control of electrostatic adhesive force, and proceeded with the application in the field of human-computer interaction. Therefore, this work has a strong theoretical and engineering significance.

Figure 4. Experiments about the So-EAGlove worn on a human hand
Quan Xiong, Research Assistance of SUSTech, is the first author of this paper. Prof. Hongqiang Wang is the corresponding author, and SUSTech is the first affiliation.
This work was supported in part by the National Natural Science Foundation for Young Scientists of China, Natural Science Foundation of Guangdong Province, Shenzhen Science and Technology Innovation Commission, Natural Science Foundation of Liaoning Province, and the Southern Marine Science and Engineering Guangdong Laboratory.
Paper link: https://ieeexplore.ieee.org/document/9779427
To read all stories about SUSTech science, subscribe to the monthly SUSTech Newsletter.
Proofread ByAdrian Cremin, Yingying XIA
Photo By






