Nature has a wide variety of insects that are agile and diverse. Scientists and engineers have been trying to mimic insects to create miniature robots with similar performance but have encountered many challenges. One of the main challenges is that the power of motors at the microscale is extremely low, which makes it challenging to support the long-time movement of miniature robots. Therefore, for a long time, the main focus has been on how to increase the power density of motors.
Associate Professor Hongqiang Wang’s research group from the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech) has recently published a paper about an underactuated miniature robot driven by a single motor.
Their research, entitled “SimoBot: An Underactuated Miniature Robot Driven by a Single Motor,” was published in IEEE Transactions on Mechatronics (TMech).
Generally, a robot needs more than two motors for complex motion on a plane, but for a miniature robot, its weight and energy consumption are too large to work. In this study, only one motor is used, and the interaction between the centrifugal force generated by the motor and the frictional force of the robot motion is utilized to achieve the movement of SimoBot following the desired complex path on a plane. This research realized a low-power, long-running miniature robot based on a multidimensional underactuated mechanism.
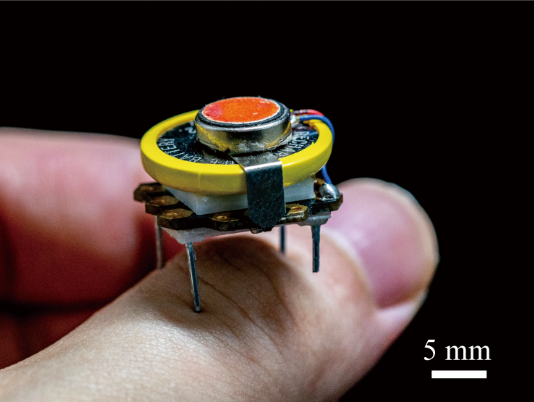
Figure 1. SimoBot
Prof. Wang’s team designed a new miniature robot from the new perspective of improving the efficiency and utilization of motors’ energy. In comparison, traditional miniature robots require planar motion based on more than two motors. The weight of their motors causes huge energy consumption, and the complex mechanism further aggravates the reduction of mechanical efficiency and brings problems such as easy damage and high cost.
By designing a new motion mechanism, Prof. Wang’s team greatly simplified the number of motors to one and eliminated the underactuated mechanism. The robot prototype weighs only 4.76 grams, with a diameter of 20 mm and a height of 18 mm. It can run at speeds of up to 40 mm/sec. By modulating voltage polarities on the motor and the periods, SimoBot was demonstrated by the movement along straight lines, circles, “S” curves, and more complex trajectories.
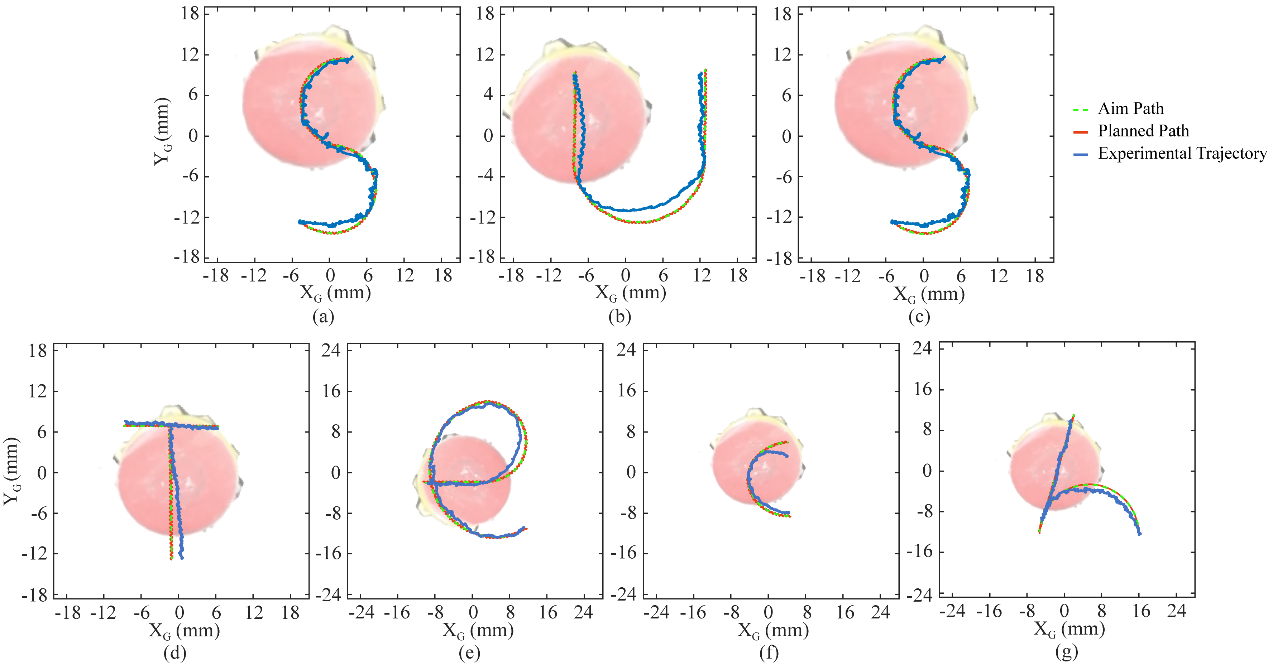
Figure 2. Trajectories of SimoBot fitting all the alphabets of SUSTech
Video 1. The walking trajectory of SimoBot reflecting all the alphabets of SUSTech
Master’s student Yifan Zhang and Ph.D. student Renjie Zhu are the co-first authors of this paper. Prof. Hongqiang Wang is the corresponding author, and SUSTech is the first affiliation.
This work was supported in part by the National Natural Science Foundation for Young Scientists of China, Natural Science Foundation of Guangdong Province, Shenzhen Science and Technology Innovation Commission, Natural Science Foundation of Liaoning Province, and the Southern Marine Science and Engineering Guangdong Laboratory.

Figure 3. SimoBot II
Video 2. Reflecting the test control of SimoBot II
Based on the above research, the group further improved the structure and actuation and designed a SimoBot II to improve motion stability. Their related results, entitled “Miniature Mobile Robot Using Only One Tilted Vibration Motor”, were published in Micromachines.
Ph.D. student Renjie Zhu and master’s student Yifan Zhang are the co-first authors of this paper. Prof. Hongqiang Wang is the corresponding author, and SUSTech is the first affiliation.
This work was supported in part by the National Natural Science Foundation of China, Natural Science Foundation of Guangdong Province, Shenzhen Science and Technology Innovation Commission, Natural Science Foundation of Liaoning Province, and the Southern Marine Science and Engineering Guangdong Laboratory.
Paper links (In order of appearance above):
IEEE Transactions on Mechatronics: https://ieeexplore.ieee.org/document/9833904
Micromachines: https://www.mdpi.com/2072-666X/13/8/1184
To read all stories about SUSTech science, subscribe to the monthly SUSTech Newsletter.
Proofread ByAdrian Cremin, Yingying XIA
Photo By






