Soft robots, with high adaptability and deformation, are promising for safe human-robot interaction, dexterous manipulation, and inspection in a confined environment. Although the bending, expanding, and shrinking movements of soft robots have been widely studied, little research exists on twisting (torsional) soft actuators, resulting in a lack of robot motion degrees of freedom and missing part of the motion space, making it a major missing piece of the puzzle in current soft robot design.
Associate Professor Hongqiang Wang’s research team from the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech) has recently made new progress in the field of pneumatic soft twisting actuators.
The results, entitled “Origami-inspired soft twisting actuator,” were published in Soft Robotics (SoRo), one of the top journals in the field of robotics.
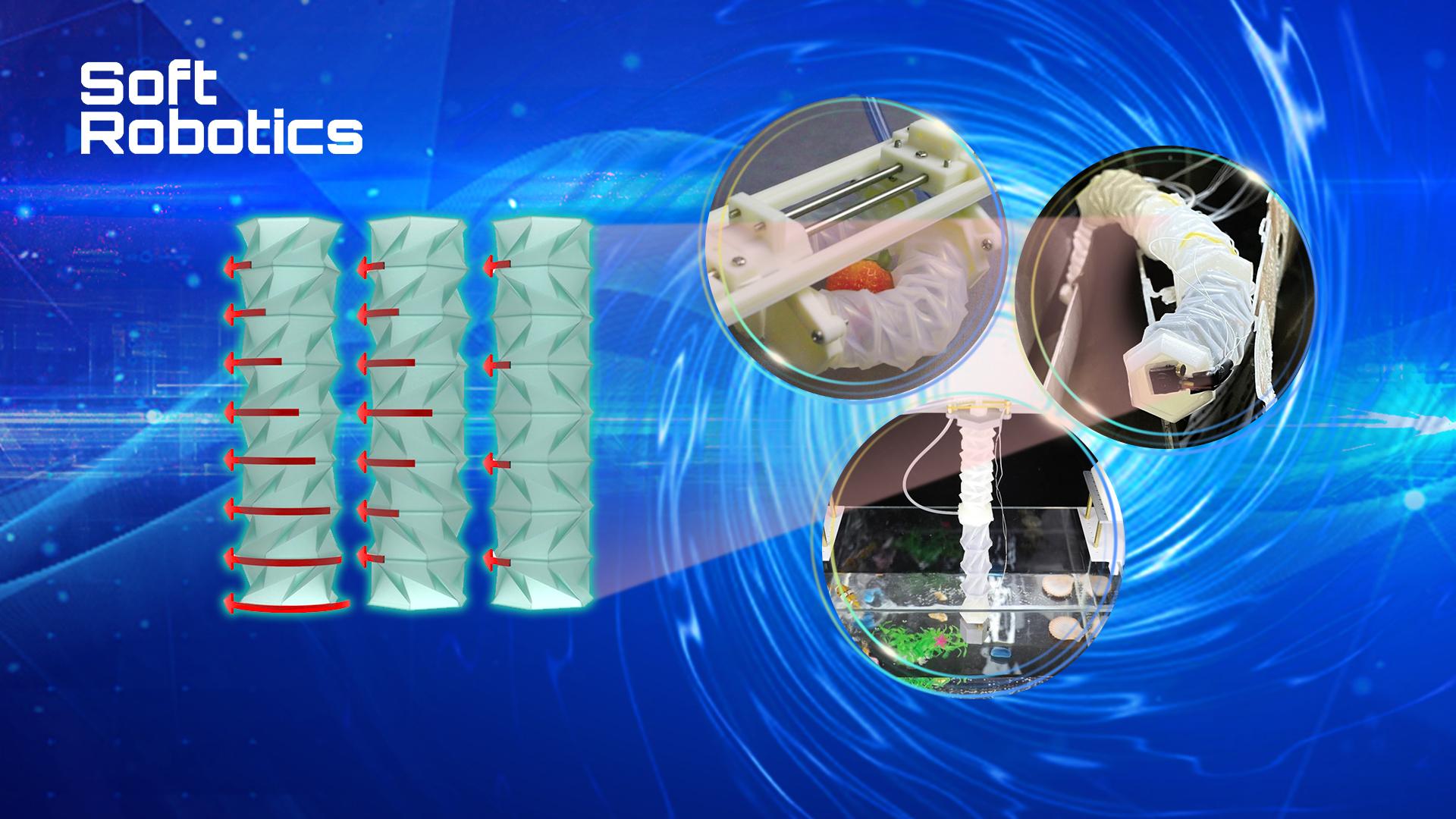
It is only recently that researchers have developed soft twisting actuators. However, there are a few designs for the rotation of soft actuators, and most of them generally have problems like limited rotation angle and low rotation efficiency. To address this problem, Prof. Wang’s group has designed and fabricated a novel origami-inspired soft pneumatic actuators (OSPAs) from origami theory. Via the integration of the Kresling origami pattern into the design of the actuator, the rotation angle of the OSPAs can reach 435 degrees, which is also the largest angle of rotation of any known soft pneumatic actuator.

Figure 1. Three types of robots composed of OSPA actuators
The researchers also established an analytical model of the OSPA actuator. They parametrically analyzed the design parameters to investigate the coupling relationship between the folding angle, scale, and shape for the rotation angle and torque. They finally carried out an optimization design to achieve the maximum rotation angle. Based on the Multi Flexible Body Dynamics (MFBD) model, Prof. Wang’s team established the relationship between air pressure and rotation angle. In addition, they performed tensile and compression tests, load-bearing tests, life tests, and impact tests on the OSPA actuator. The results fully demonstrate its superiority over paper-based structures.
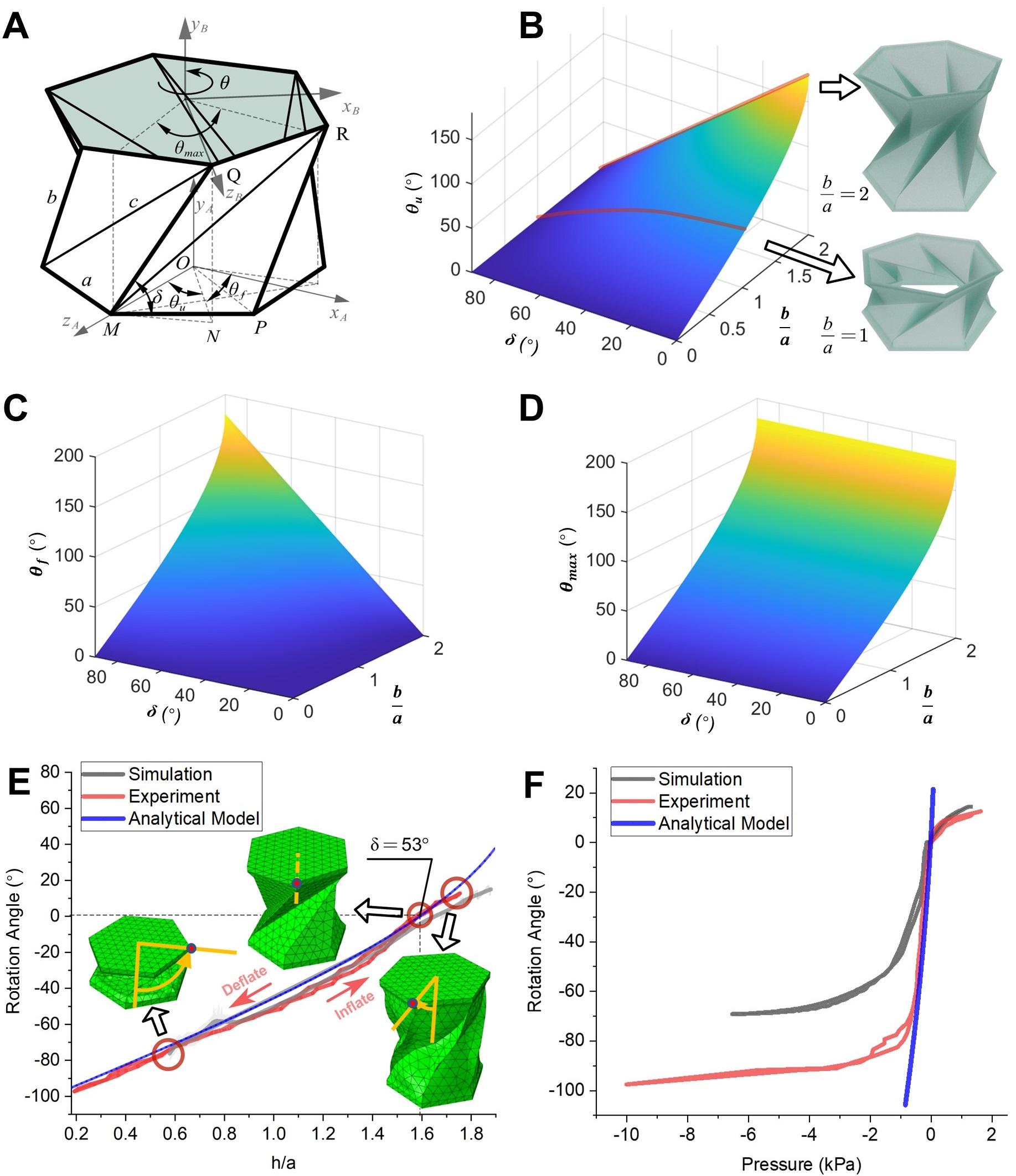
Figure 2. Analytical model
Moreover, the researchers demonstrate the potentially extensive utility of the OSPAs through their integration into three robot prototypes. The first prototype robot is a soft gripper with in-hand manipulation (in-hand manipulation) capability, enabling the grasping of fragile objects (e.g., cherry tomatoes) and films (e.g., a piece of paper) while “rolling” the object into the inside of the manipulator to achieve stable grasping behavior. The second prototype is a multi-functional modular robotic arm that can be connected to a camera to monitor a robotic fish swimming randomly in the water in all directions by changing the camera’s pose and perspective. Or a suction cup is mounted on the free end of the arm. Based on the contraction, expansion, and twisting motion of the soft actuator, the soft robot arm can successfully pick and place items into the appropriate slots. A third prototype of the snake robot demonstrates its compliant motion in a pipe and the ability to benefit from the rotational motion of the OSPA, resulting in a rotating head that flexibly adjusts the camera’s angle and further guides the snake robot into different exits.
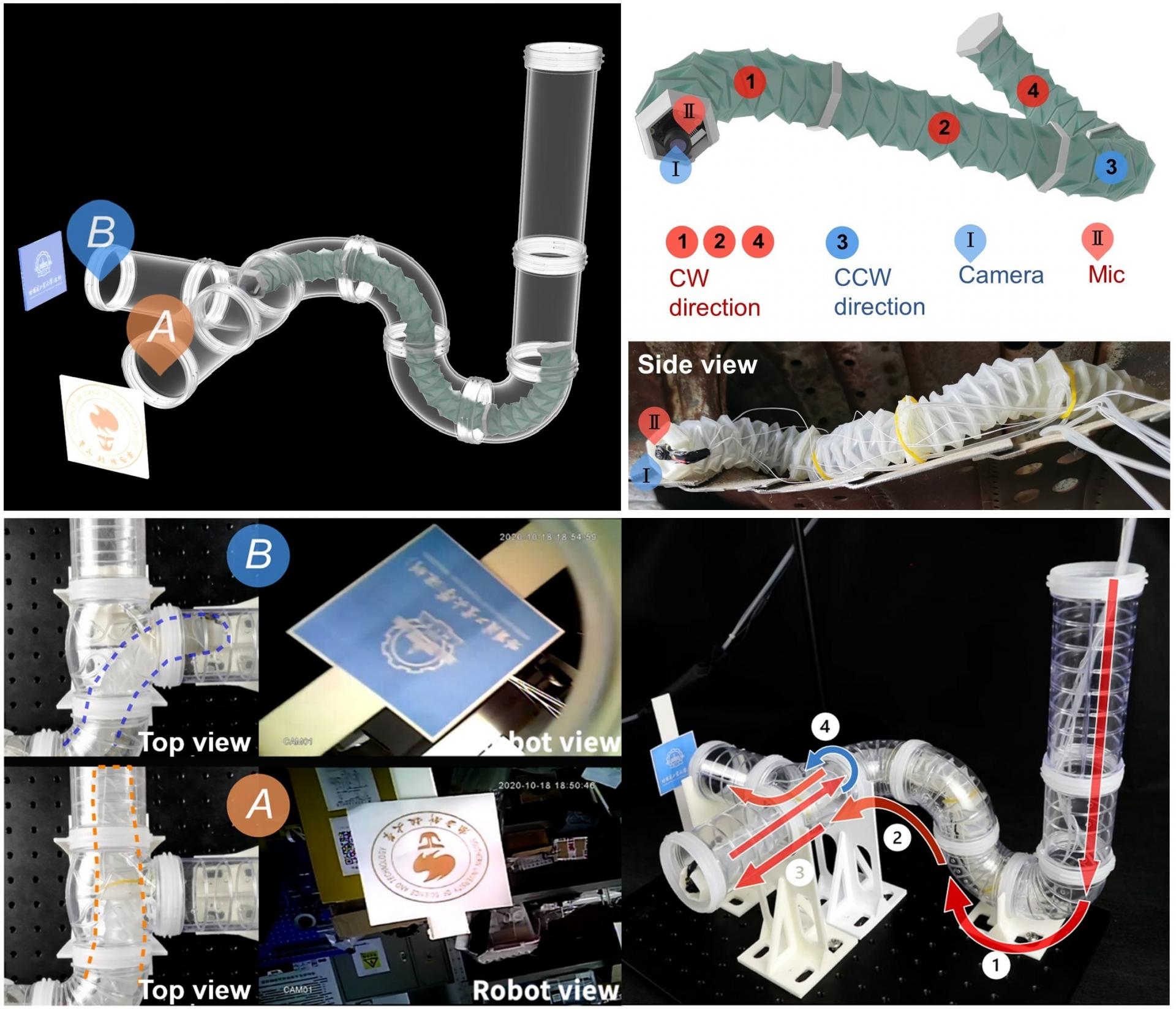
Figure 3. Soft snake robot
Diancheng Li, a Research Assistant in Assoc. Prof. Hongqiang Wang’s group, is the first author of this paper. Assoc. Prof. Wang Hongqiang Wang is the corresponding author, while undergraduate students Yuxuan Liao and Xin Yang are the co-authors. Dongliang Fan and Renjie Zhu, Ph.D. students from the Department of Mechanical and Energy Engineering, also participated in this study, and SUSTech is the first correspondent of the paper.
The project was supported by the National Natural Science Foundation of China (NSFC) and the Natural Science Foundation of Guangdong Province.
Prof. Wang’s Advanced Actuators and Robotics Lab (AARLab) welcomes students who are interested in electrostatic actuators, soft robots, and intelligent robots. For contact information, follow the group’s homepage below.
Paper link: https://doi.org/10.1089/soro.2021.0185
Prof. Hongqiang Wang’s group homepage: https://wanglab.mee.sustech.edu.cn/
To read all stories about SUSTech science, subscribe to the monthly SUSTech Newsletter.
Proofread ByAdrian Cremin, Yingying XIA
Photo By






