Compared to many rigid robots, emerging soft robots possess higher adaptability and safety owing to their compliance, making them a promising solution for human-robot interaction, manipulation, and search and rescue. Instead of only having one state (soft or rigid) in a robot, many scenarios necessitate both soft and rigid properties. For example, when picking an item of varying softness, shape, and weight using various motions, such as grasping and fiddling, a packaging robot should be rigid enough to grasp heavy items but soft enough to grasp fragile or irregular items while also being capable of quickly switching between these two states.
While exploring dangerous and confined environments (e.g., post-earthquake rescue and industrial pipeline inspection), the robot should be sufficiently compliant to adapt to the cluttered environment and rigid to transport a large gap. Moreover, if a robot approaches a rugged surface with a heavy payload, it should be sufficiently compliant to move on the surface and rigid to support the payload.
To circumvent this problem, researchers attempted to integrate rigid and soft robots. One approach is to convert a robot from a rigid to a soft state and vice versa, which requires a variable-stiffness mechanism. However, a variable-stiffness robot can only stay in either the soft or rigid state, but cannot retain both properties in one structure simultaneously.
Chair Professor Jian S. Dai’s team and Associate Professor Hongqiang Wang’s team from the School of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech) have recently proposed a novel concept of an origami anisotropic stiffness structure, which simultaneously possesses rigidity and softness properties in different directions, leading to the development of novel soft robots.
Their research, entitled “Soft Robots for Cluttered Environments Based on Origami Anisotropic Stiffness Structure (OASS) Inspired by Desert Iguana,” has been published in Advanced Intelligent Systems.
Design of the Origami-entailed Anisotropic Stiffness Structure
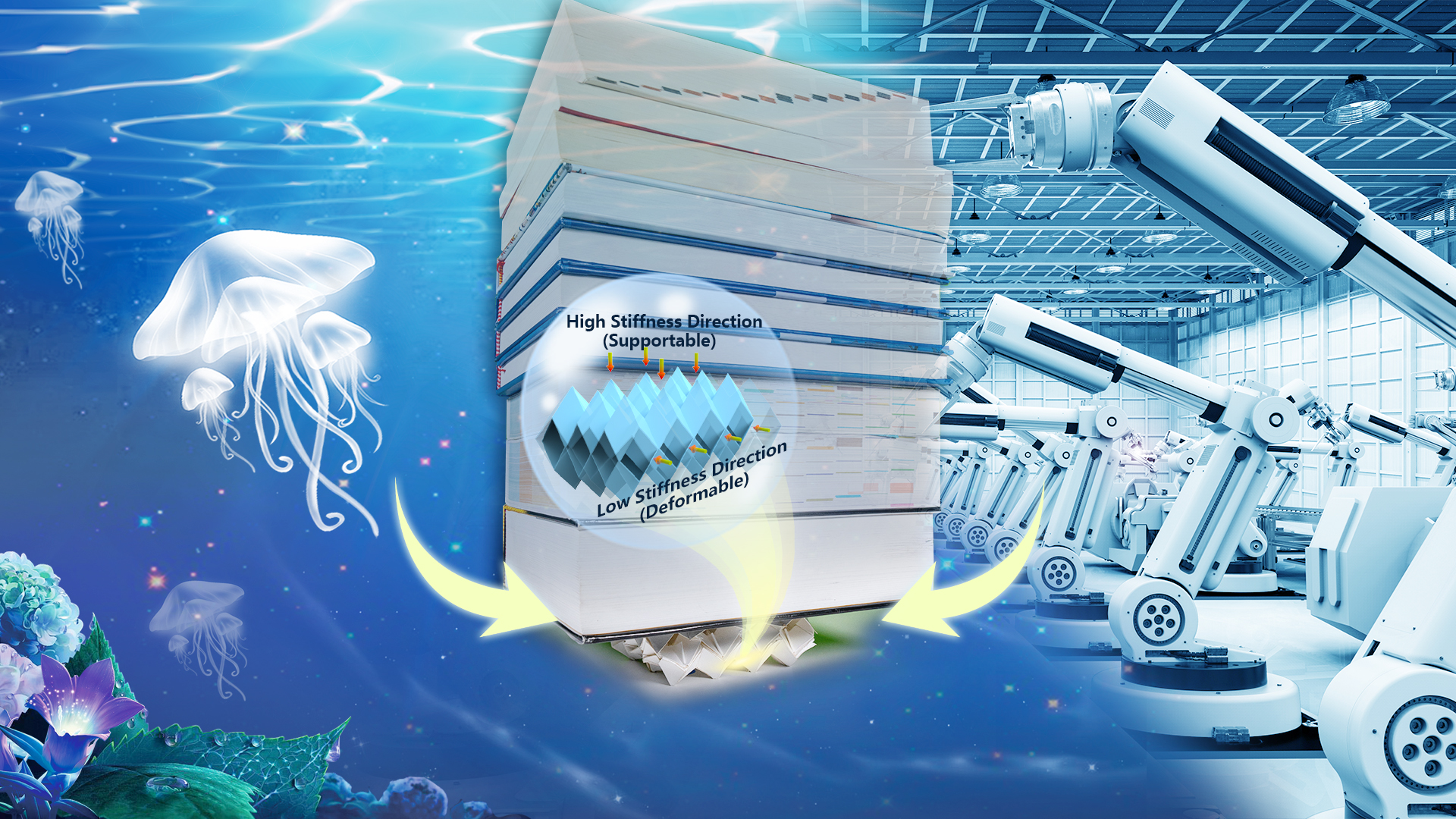
Inspired by the desert iguanas’ skin, the researchers proposed a novel origami-entailed anisotropic stiffness structure (OASS), which coexists with rigidity and softness states in different directions. Then, the OASS is constructed to develop three novel soft robots: a crawling robot moving under an ultra-heavy payload, a prosthetic hand grasping fragile items and lifting or crushing items, and a snake-shaped robot traveling and extruding out.
In this research, inspired by the Miura-ori structure, they proposed a novel design of the OASS to solve the problem of both soft and rigid states demanded in one structure and promote the versatility of robots (Figure 1). In contrast to variable-stiffness structures that require longer time and specific stimuli to achieve soft-rigid status switching, the OASS combines both rigid and soft properties along different directions in a single structure, with both soft and rigid states coexisting.
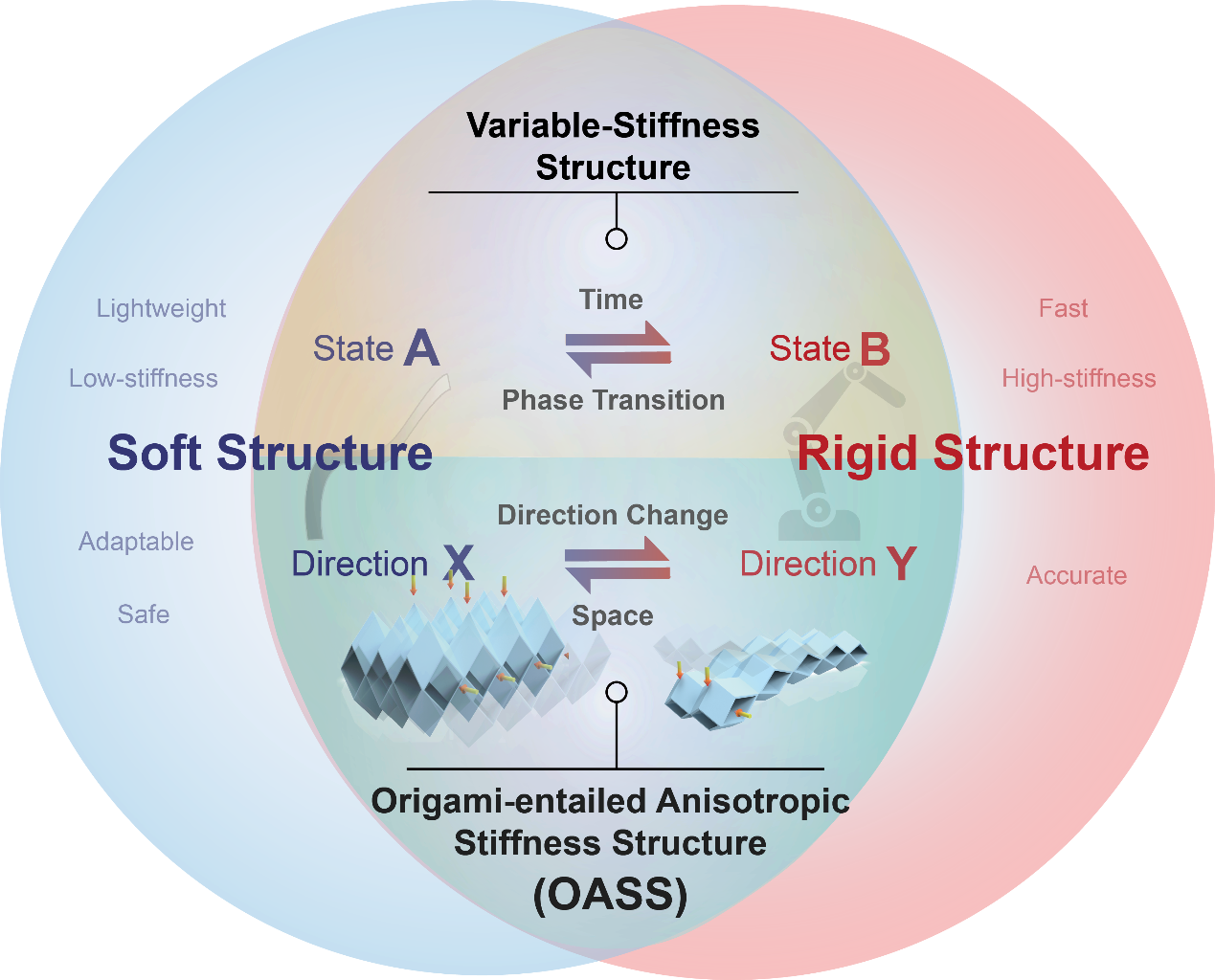
Figure 1. Concept of the OASS; Comparison of the rigid structures, the soft structures, the variable-stiffness structures, and the OASS
Parametric analyses of the OASS
The researchers analyzed the anisotropic compression and bending stiffnesses on six primary parameters, including: the length of the ridge; the angle between the two ridges; the thickness of the shell; the cross-sectional area of the OASS molecule tube; and the number of bulges in the y- and x-directions, respectively. The OASS is susceptible to lateral shrinking or expansion when subjected to a weak horizontal force, while it can resist a strong vertical force.
To achieve a higher stiffness ratio, they can increase the number of bulges and ridge length, reduce the layer thickness, and approximate the ridge angle to 60°. Based on the above parametric analysis of the FEA model, the researchers obtained the relationship between the six primary parameters and anisotropic compression stiffness (K) and anisotropic bending stiffness (K’). Subsequently, they selected a structure with suitable parameters and performed experimental verification. In the prototypes, the stiffness ratios for bending and compression of the OASS actuator were as high as 38.5 and 37.9, respectively.
Furthermore, the aforementioned tendencies regarding the compression/bending stiffness ratio do not vary with the materials, which is proven by the comparison results of models made of different Young’s modulus materials. The absolute value of stiffness varies with the material. Vast materials can be selected based on the specified scenarios. As a result, a complex structure of pyramid arrays can be made by the manual fabrication process of a well-studied origami structure. In addition, this structure could be integrated with electrical circuits, sensors, controllers, etc., for extensive future applications.
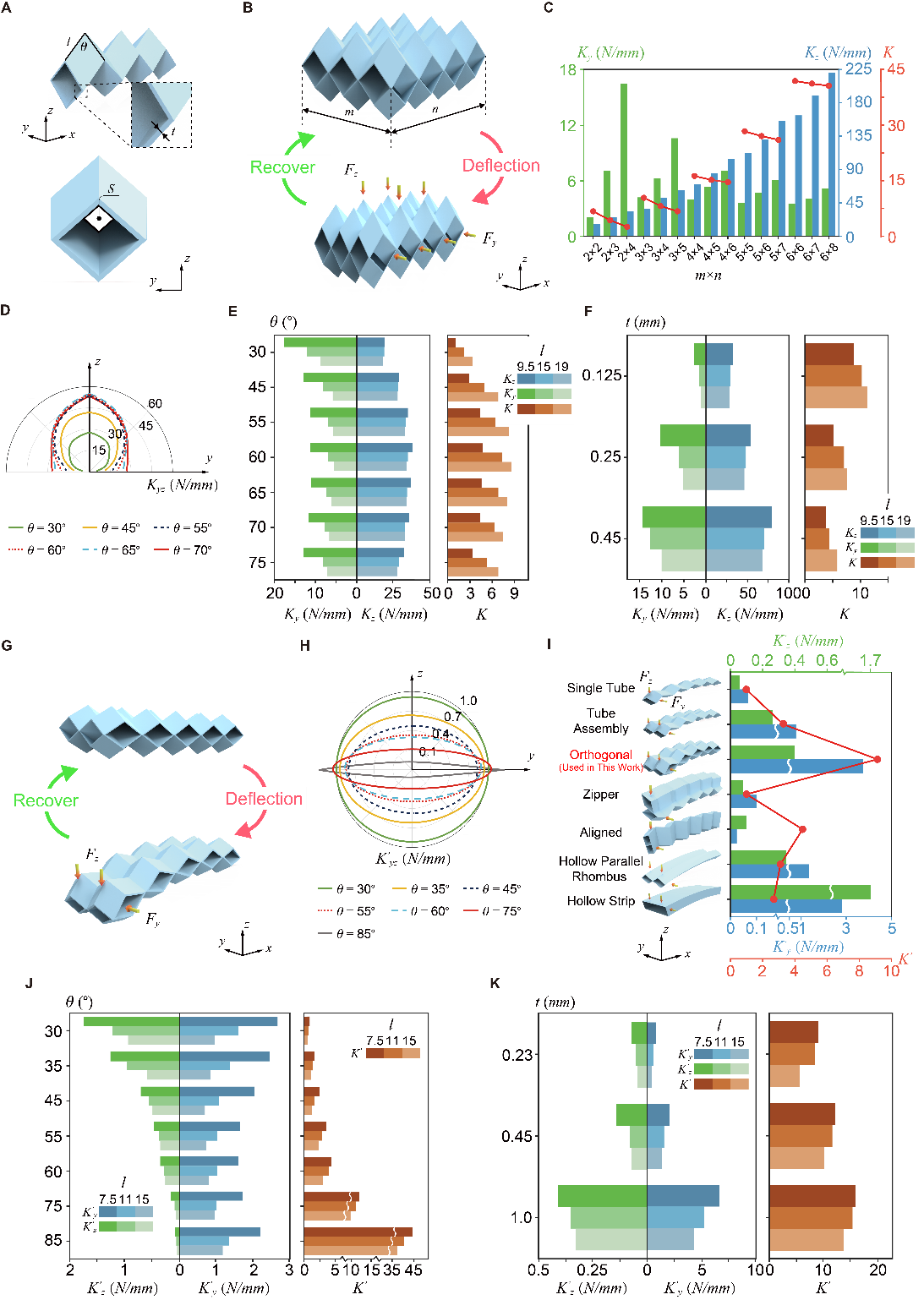
Figure 2. Parametric analysis of the OASS
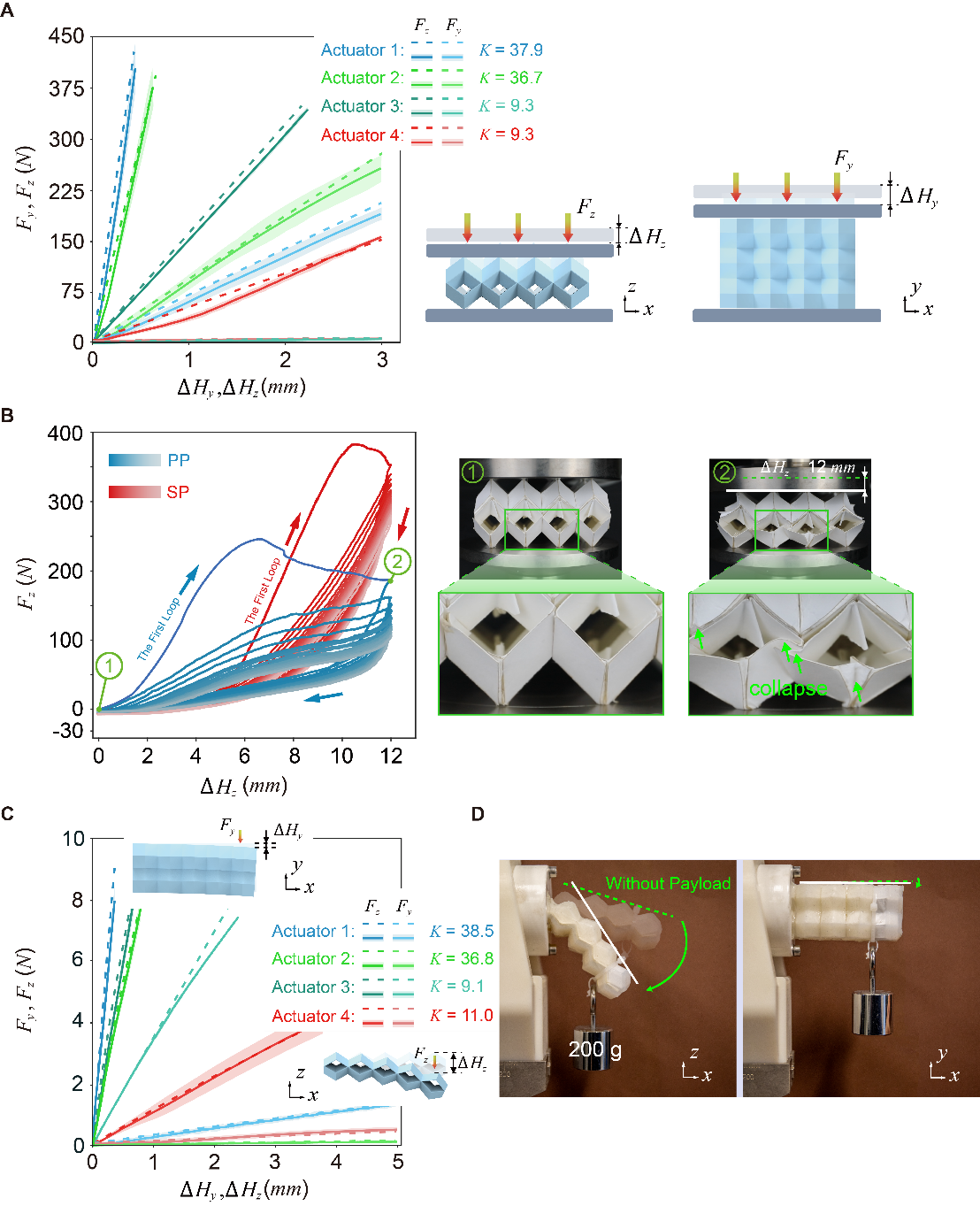
Figure 3. Characterization of the anisotropic stiffness of the OASS
Demonstrative applications of the OASS-based soft robots
In this study, the researchers fabricated different OASS actuators and robots by arranging modules with different shapes and sizes and demonstrated the extensive impacts of OASS actuators using a heavy load-bearing crawling robot, dexterous prosthetic hand, and multifunctional snake robot.
1) Crawling robot capable of carrying an ultra-heavy payload
Compared to conventional soft robots, two OASS-based crawling robots are soft in the horizontal direction but stiff in the vertical direction to protect the air path from a heavy payload. The small robot of only 30 g withstood a payload of 8.4 kg, 280 times heavier than its weight. While moving, it carried a 3.4 kg payload, 117 times its weight, and almost 18 times the maximum payload for some existing robots. With more OASS module tubes (6×8 OASS actuator), the big one is capable of carrying a lady volunteer (approximately 46 kg) and can move forward on the ground.
2) Prosthetic hand
The anisotropic stiffness hand using the OASS actuators, which can quickly switch stiffness (by simply shifting the working direction), consumes little energy, and is versatile, lightweight (1.8 kg), and low-cost ($ 263.4). Experiments show that the solid-soft hand, similar to those in previous reports, failed to grab plate items, lift large or heavy items (i.e., 1.5 kg milk box and 1.8 kg book), push a bulky item (approximately 2.5 kg) on the plane or fiddle an item at the corner of a box because of poor rigidity. Conversely, the OASS hand completed these tasks by shifting the effective direction to the high-stiffness side. With its rigid side, the OASS hand could even smash an egg. Furthermore, the OASS hand held the item firmly based on the synergistic work of softness and rigidity, although the hand moved quickly with 4 m s-1 at speed and 4 m s-2 at acceleration.
3) Snake-shaped robot
The snake-shaped robot is connected to two OASS actuators in series. It is characterized by both anisotropic compression and bending stiffness. It has a high-stiffness side to carry a heavy payload or cross a large gap and a low-stiffness side to create body waves and travel on the ground, similar to a snake. Experiments show that the robot moved continuously while carrying a 1 kg payload or even being buried by heavy objects (e.g., soils and cabinets), making it promising for post-disaster search and rescue. In addition, on the rigid side, it spanned air with 50% of its body length to pass a large gap.
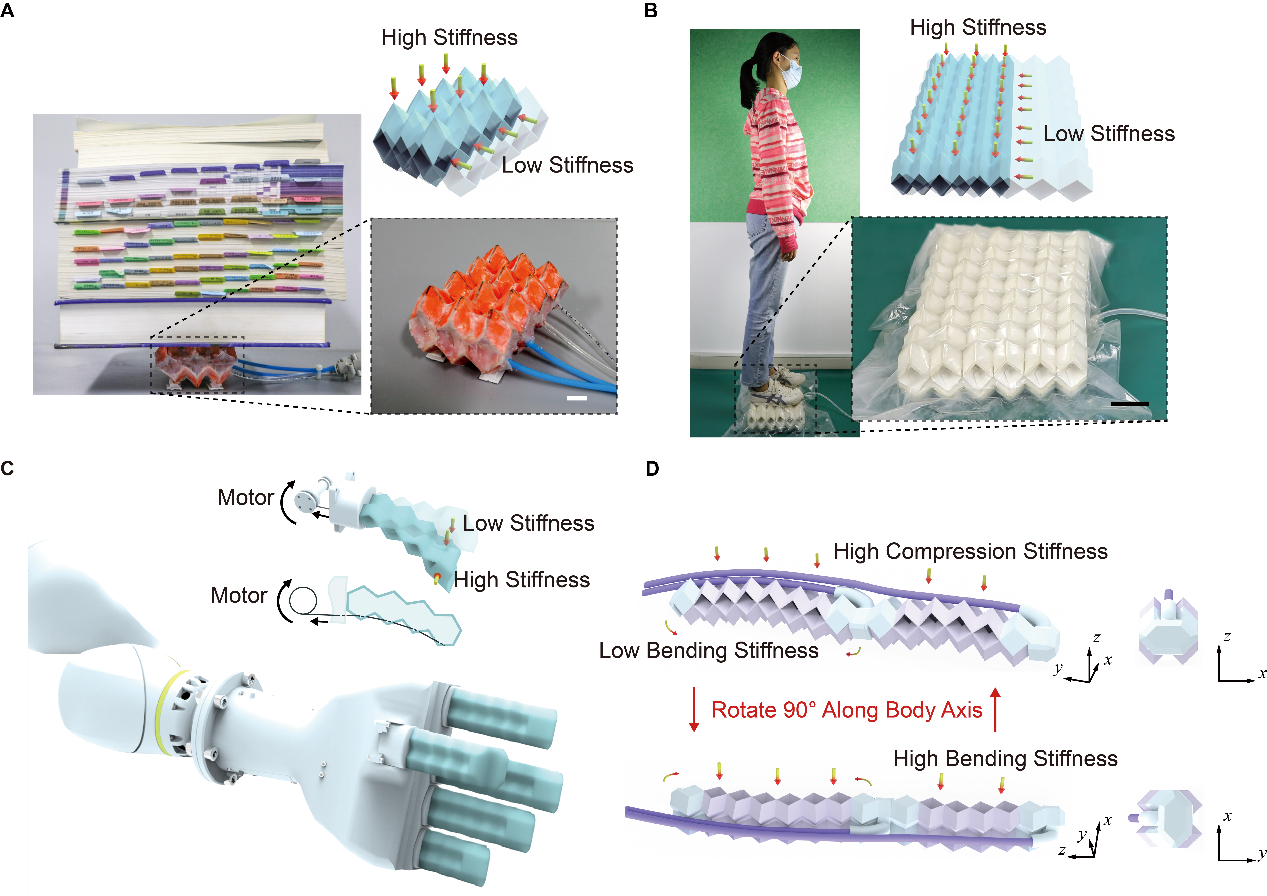
Figure 4. Three novel OASS-based robots
Renjie Zhu, a Ph.D. student at SUSTech, is the first author of this paper. Chair Prof. Jian S. Dai and Assoc. Prof. Hongqiang Wang at SUSTech are the corresponding authors.
This research was supported by the National Key R&D Program of China and the National Natural Science Foundation of China (NSFC).
Paper link: https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202200301
To read all stories about SUSTech science, subscribe to the monthly SUSTech Newsletter.
Proofread ByAdrian Cremin, Yingying XIA
Photo By






