Recently, a research team led by Associate Professor Hongqiang Wang from the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech) published a paper entitled “Biologically inspired electrostatic artificial muscles for insect-sized robots.” It was published in the International Journal of Robotics Research, a top journal in the field of robotics. It proposes a novel design paradigm for artificial muscle and implements highly compliant, controllable, scalable mesoscale actuators and robots.
Insect-sized robots have extensive applications such as inspection, search and rescue, and exploration. Actuation is one of the primary challenges in the development of miniature robots since conventional electromagnetic motors suffer an unfavorable scaling in this size regime. On the other side, the animal muscle possesses advantageous features such as being highly scalable, robust, lightweight, and soft, mainly due to its hierarchical structure (from nanometer myosin and actin to millimeter fiber to macroscopic muscle) and soft constituents.
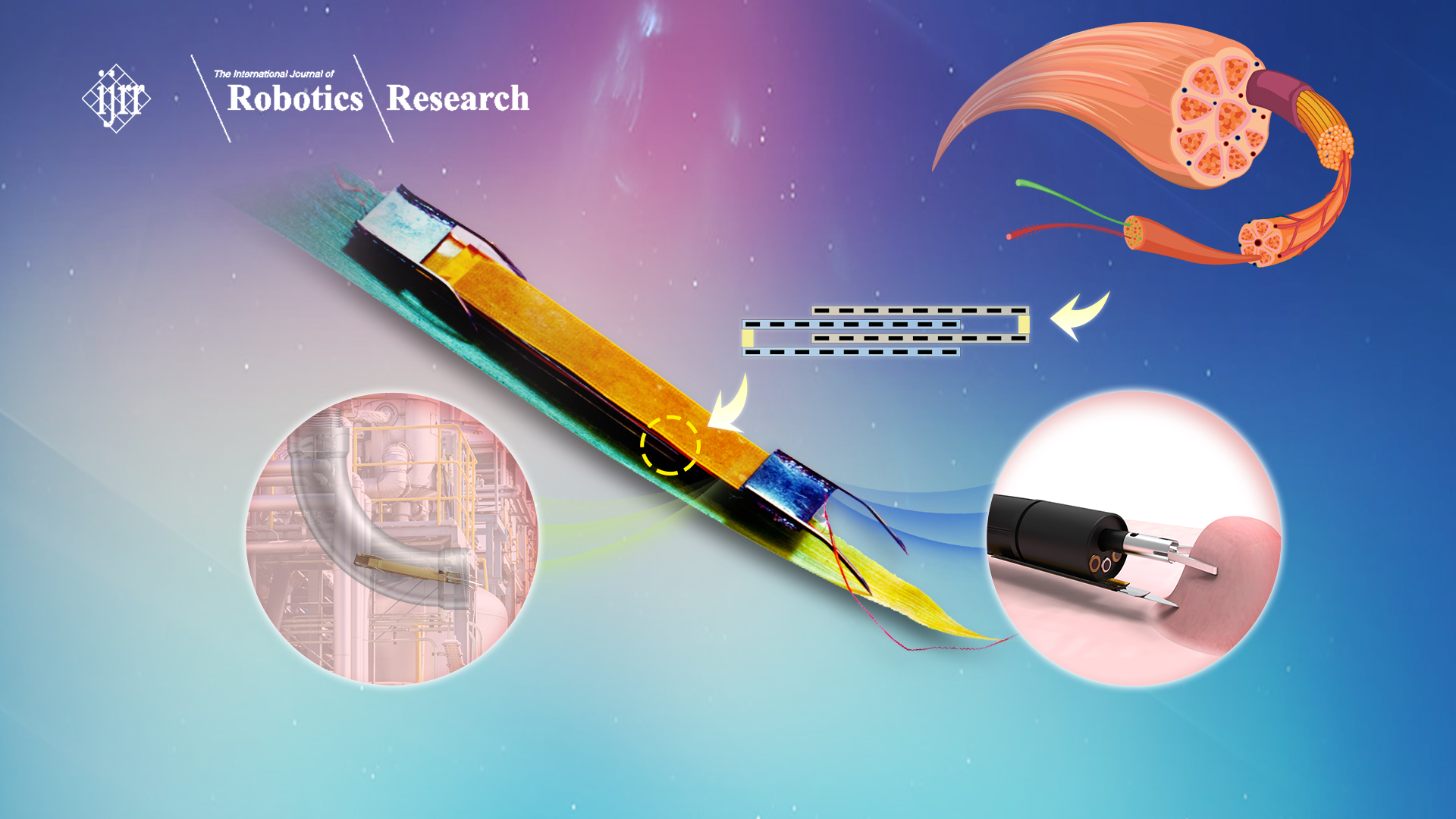
This paper presents a millimeter-scale muscle-inspired electrostatic linear actuator and its integration into two miniature devices: a crawling robot and a simple surgical cutting tool. Inspired by the versatile muscle, this team designed a hierarchical-structured, low-profile, compliant, scalable miniature actuator based on a novel electrode pattern and fabrication and assembly method. The results are several ultra-thin (less than 0.4 mm), long stroke (approximately 15 mm), lightweight (tens of milligrams) actuators that can achieve 60 W/kg power density (in the range of skeletal muscle’s power-to-weight ratio). They applied these actuators to a miniature earthworm-inspired robot (2 mm high) which can freely locomote on a horizontal surface and navigate a narrow crevice. They also show, inspired by the intestinal smooth muscle, the low-profile actuators attached to the distal end of an endoscope can drive a blade/needle to cut or penetrate tissue in a simulated surgical procedure.
This work paves the path to more compact, lightweight, powerful, and agile miniature robots. They believe this work will attract interest from academia, industry, and the public, and stimulate researchers to direct new efforts towards developing mechanisms and principles in insect-sized robots. The actuators (as a common but critical component in electromechanical systems), fabrication methods, and models reported here will benefit other fields beyond robotics in the future.
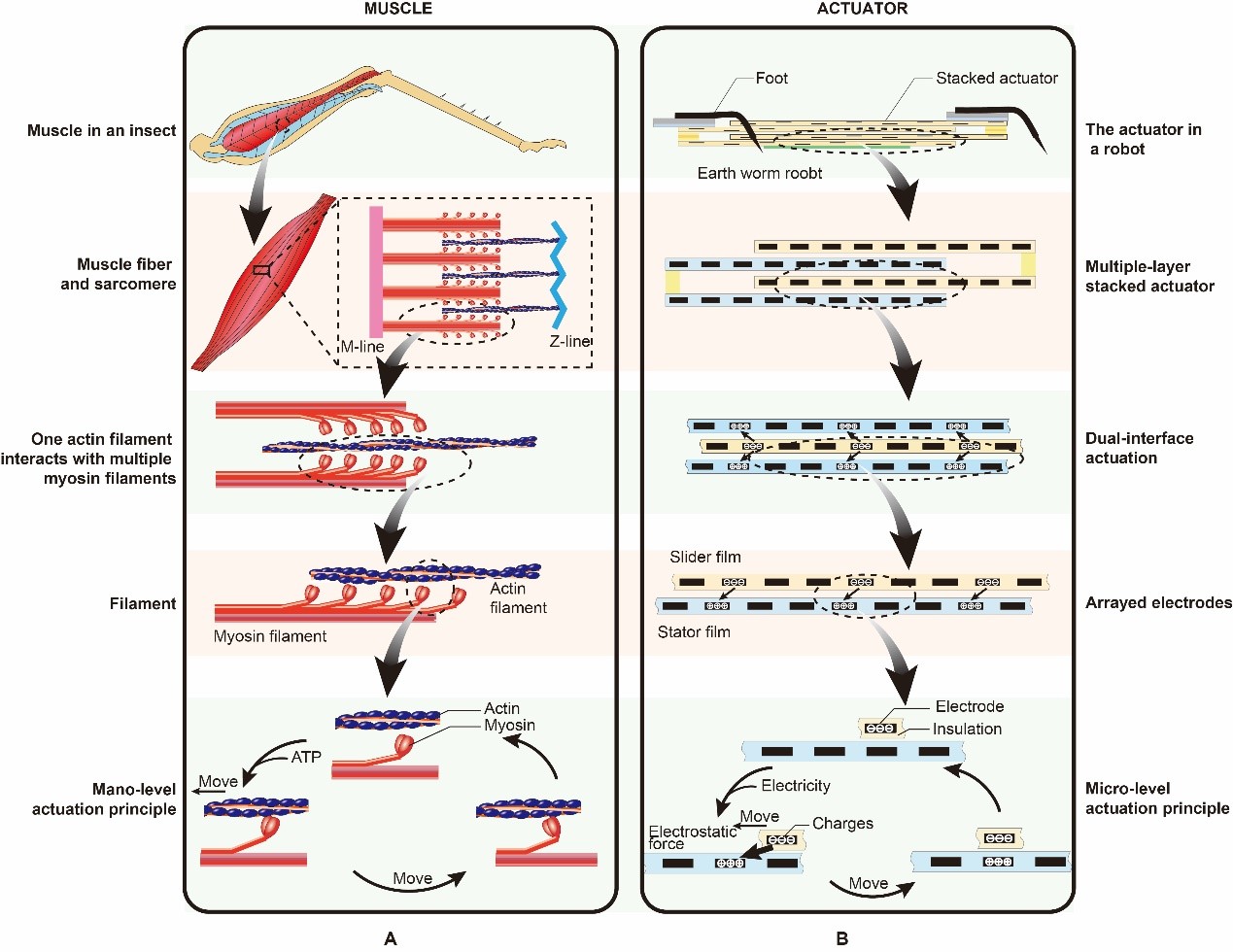
Figure 1. A similar hierarchical structure between (A) the muscle and (B) the electrostatic artificial muscle

Figure 2. Electrostatic artificial muscle

Figure 3. Earthworm robot using the electrostatic artificial muscle
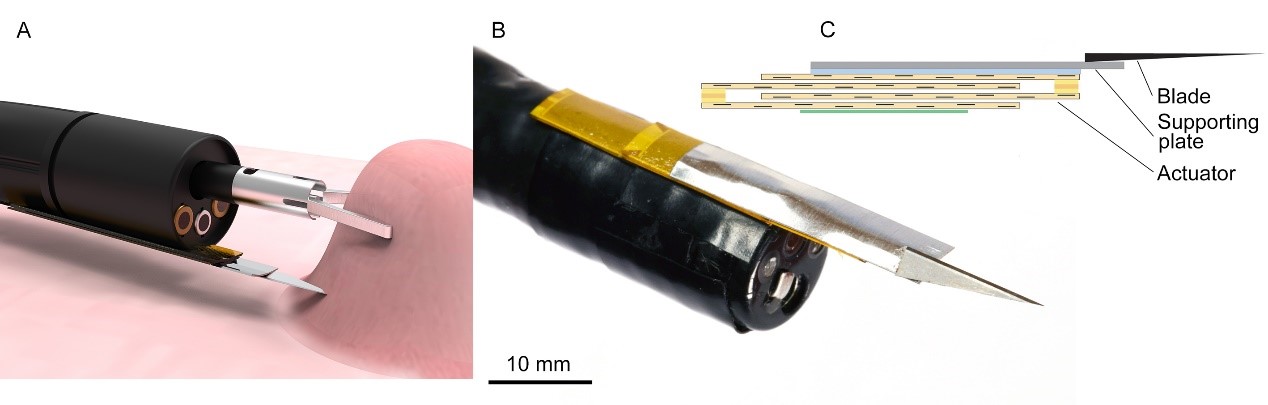
Figure 4. Smooth-muscle inspired ultrathin surgical robot using the electrostatic artificial muscle
Associate Professor Hongqiang Wang at SUSTech is the co-corresponding author, while SUSTech is the co-correspondent unit of the paper. This project is supported by the National Natural Science Foundation of China (NSFC), Natural Science Foundation of Guangdong Province of China, and the Science, Technology and Innovation Commission of Shenzhen Municipality.
Paper link: https://journals.sagepub.com/doi/full/10.1177/02783649211002545
Proofread ByAdrian Cremin, Yingying XIA
Photo By






