The research group led by Associate Professor Mingming ZHANG at the Department of Biomedical Engineering, Southern University of Science and Technology (SUSTech), has achieved a series of research advances in the field of innovative rehabilitation robotic systems. The research results have been published in IEEE Transactions on Robotics, a top journal in robotics.
Work 1: Multi-user Collaborative Haptic Interaction Method and Innovative Rehabilitation System
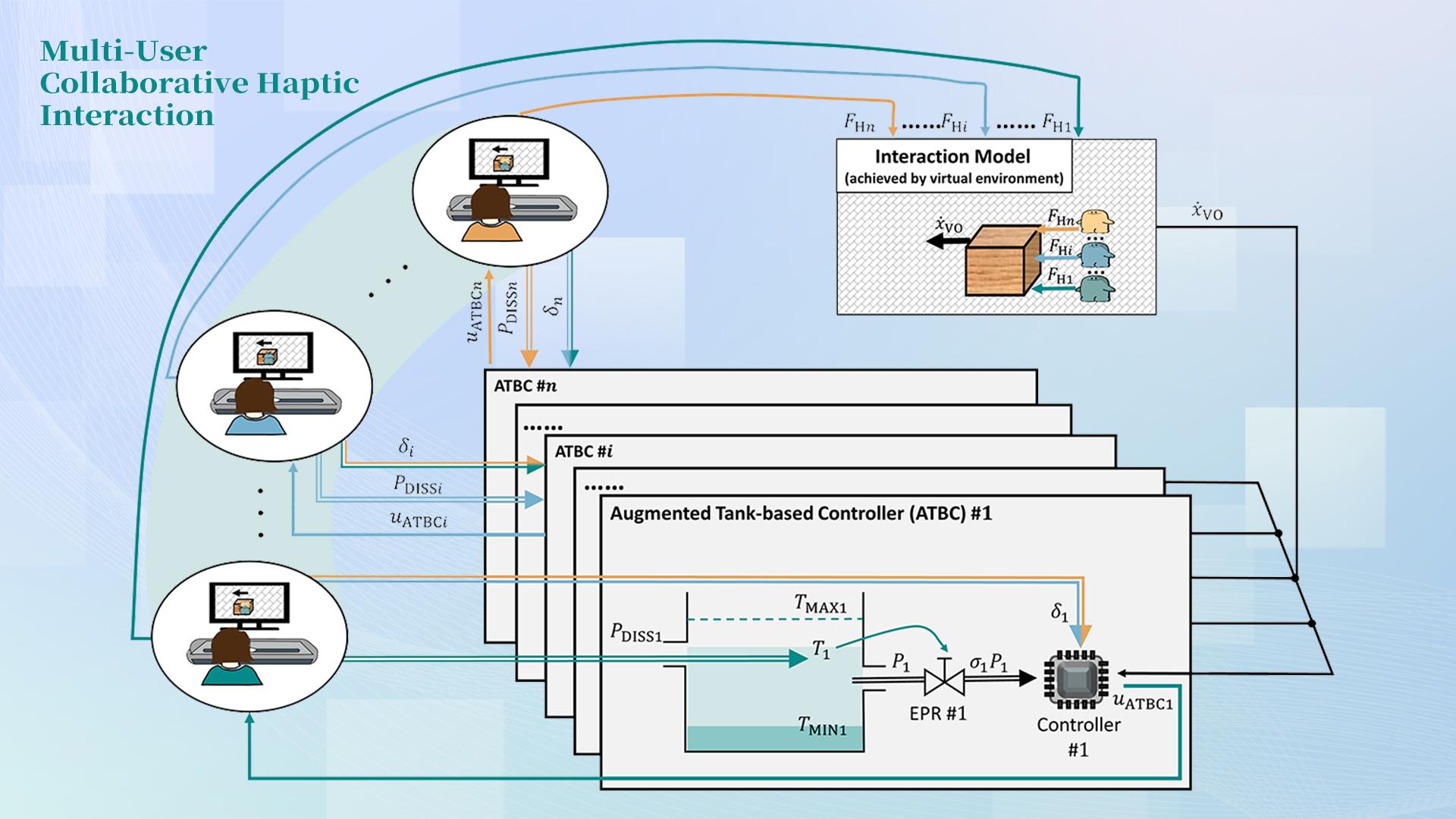
Fig. 1 Multi-user collaborative rehabilitation robotic system
In multi-user human-robot interaction, most existing studies primarily focus on the stability of the haptic interface itself and often neglect the mutual influence among human operators. In contrast, this work does not regard operators as independent passive terminals. Instead, it explicitly incorporates a fundamental principle into the control design: each operator inherently forms part of the interaction environment for the others, such that their individual behaviors continuously and directly affect others’ perceptions and overall system stability. As the number of operators increases, particularly when they exhibit active behaviors, conventional control methods become inadequate to address the resulting interaction coupling and complex stability conditions. Therefore, achieving a scalable control design in the presence of non-passive human operators remains a key challenge.
To address this challenge, this study proposes an Individual Interaction Environment (IIE) framework that isolates the potentially passivity-violating interaction components. By enabling the independent control design for each human-robot interaction subsystem, this framework fundamentally enhances system scalability. Within the IIE, we further identify passivity-violating components induced by partners’ non-passive behaviors and propose a novel augmented tank-based controller (ATBC). By integrating power regulation and time-varying gain mechanisms, the ATBC ensures the passivity of each IIE while effectively mitigating negative impacts on haptic rendering fidelity. Therefore, it achieves a favorable balance between system stability and interaction realism.
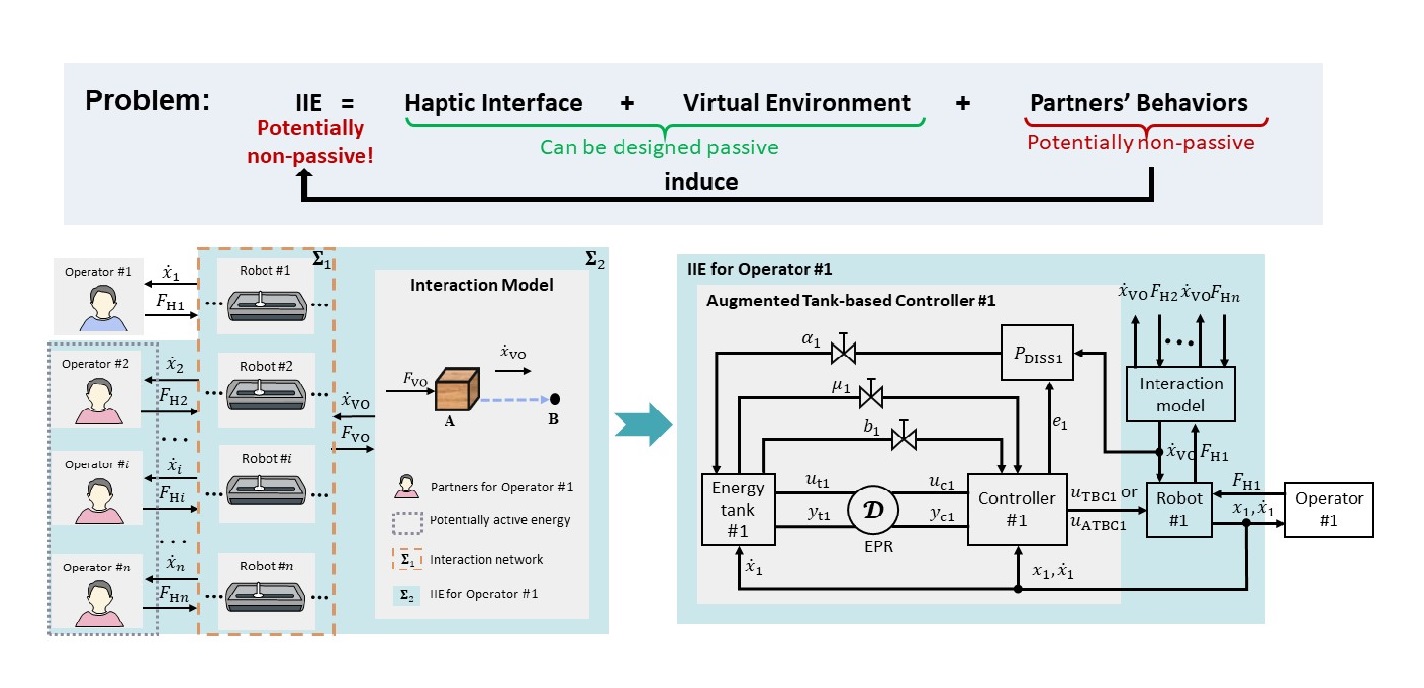
Fig. 2. Problem formulation and control framework
The experiment results demonstrate that, in multi-user haptic interaction scenarios with non-passive human behaviors, the proposed method not only ensures stable and reliable haptic rendering but also outperforms existing methods in task reproducibility and rendering fidelity. These results verify that the proposed method successfully achieves both passivity preservation under interaction coupling and high-precision haptic rendering.
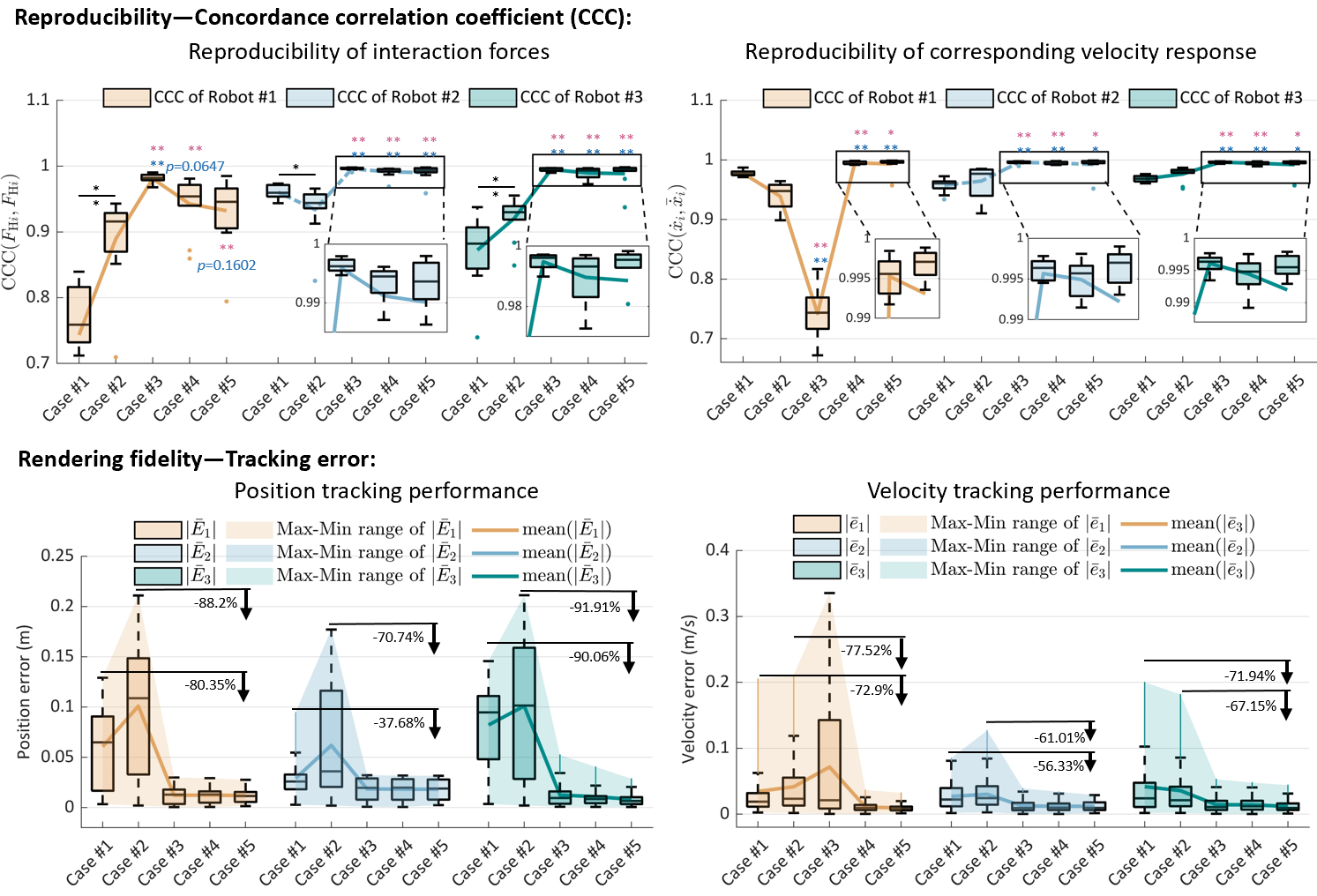
Fig. 3. The comparison results between ATBC (Case #5) and the existing methods
This study not only provides a scalable and robust solution for multi-user haptic-enabled robotic systems but also advances the paradigm of multi-user robot-human interaction toward a “human mutual-interaction-centered” aspect, laying a theoretical and technical foundation for applications such as remote collaboration and joint training.
This research was in collaboration with Professor Lu LIU’s group at City University of Hong Kong. The related paper entitled “Augmented Tank-Based Control Guarantees Passive Individual Interaction Environment for Multi-User Haptic-Enabled Robotic Systems” was published in IEEE Transactions on Robotics. Cui WANG, a joint Ph.D. student at SUSTech and City University of Hong Kong, is the first author of the paper, and Professor Mingming ZHANG is the corresponding author. SUSTech is the corresponding affiliation of the paper, and the collaborative institutions include City University of Hong Kong (Professor Lu LIU), Beijing University of Technology (Associate Professor Mingjie DONG), and University of Manchester (Assistant Professor Zhenhong LI).
Work 2: Robot-Assisted Human-like Rehabilitation Method and System Based on Imitation Learning
Motor dysfunction caused by ankle injuries and neurological diseases is a common problem in clinical rehabilitation. Currently, robot-assisted rehabilitation is widely used; however, most systems rely on preset trajectories, making it difficult to reflect the clinical experience of rehabilitation physicians or to make real-time adjustments based on the patient’s status, which limits the effectiveness of individualized rehabilitation. Addressing this bottleneck, the research team proposed a new “physician-level” imitation learning and adaptive control method for ankle rehabilitation, enabling rehabilitation robots not only to “imitate doctors’ movements” but also to possess the ability to “adjust strategies like a doctor.” The study innovatively proposed a 2-level-Kernelized Movement Primitives (2-level-KMP) imitation learning framework: first, accurately reconstructing complex operation trajectories of rehabilitation physicians through imitation learning; subsequently, introducing a patient-in-the-loop optimization mechanism that uses real-time force/torque feedback from the patient to dynamically adjust training trajectories. This achieves empirical and temporal adaptation of the rehabilitation process while ensuring trajectory smoothness and safety. This design effectively solves the problems of jitter, deformation, and overfitting common in traditional imitation learning during trajectory adjustment, making the robot training process more natural, continuous, and closer to real clinical operations. This research provides a new technical paradigm for rehabilitation robots to transition from “fixed program execution” to “intelligent decision-making integrating physician experience and patient feedback,” and is of great significance for promoting the precise application and large-scale promotion of intelligent rehabilitation equipment in clinical practice.
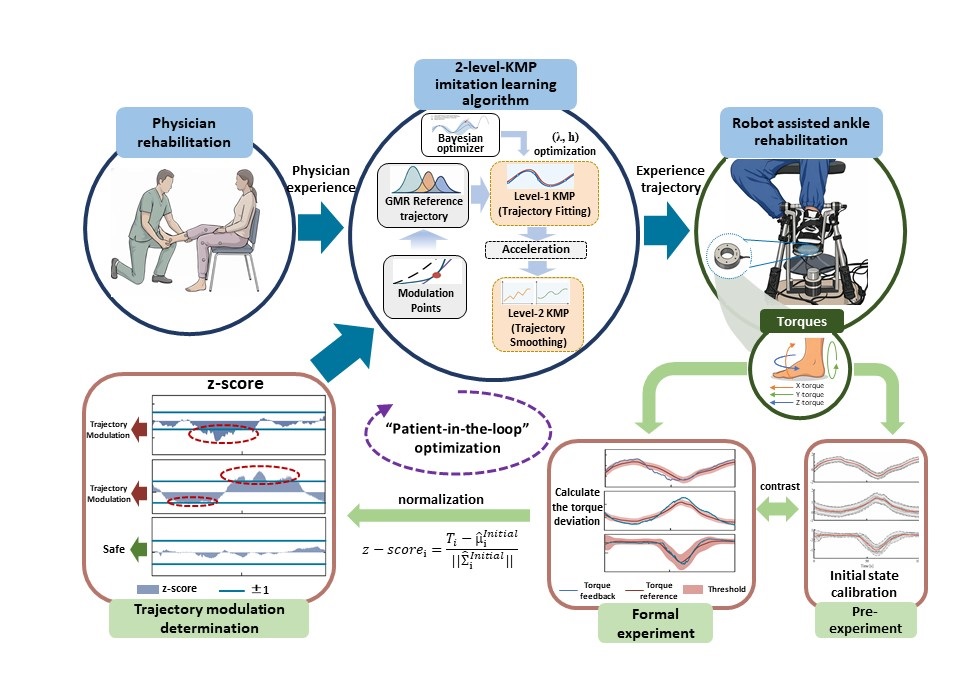
Fig. 4. Illustration of Robot-Assisted Human-like Rehabilitation Method
This research was in collaboration with Professor Jianfeng LI’s group at Beijing University of Technology. The related paper entitled “Toward physician-level performance in robot-assisted ankle rehabilitation via imitation learning with empirical and temporal adaptation” was published in IEEE Transactions on Robotics. Associate Professor Mingjie DONG is the first author of the paper, with Professor Jianfeng LI and Professor Mingming ZHANG as the corresponding authors. Beijing University of Technology is the first corresponding affiliation of the paper, with SUSTech as the collaborating corresponding affiliation.
Paper Link for Work 1: DOI: 10.1109/TRO.2026.3651680
Paper Link for Work 2: DOI: 10.1109/TRO.2025.3600162
Proofread ByNoah Crockett, Junxi KE
Photo ByYan QIU






