Professor Chenglong FU’s research team from the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech), achieved significant progress in the field of wearable walking-assistance robotics. Their work, entitled “Design, Modeling, Control, and Evaluation of a Wearable Centaur Robot for Load Carriage Walking Assistance,” has been published in the authoritative top-tier robotics journal The International Journal of Robotics Research (IJRR).

Load carriage walking is a common activity in military operations, emergency rescue, and daily life. High-intensity load carriage not only leads to a substantial increase in metabolic expenditure and a decline in operational efficiency but also poses significant risks of musculoskeletal injury. Existing wearable robots, predominantly exoskeleton-based, often exhibit a large angular deviation between the assistive force direction and the human walking direction, resulting in limited assistive efficiency. Compared with conventional backpack load carriage, such systems typically achieve only about a 10% reduction in metabolic cost.
Addressing the limitations of conventional exoskeleton-based assistive forms, Prof. Chenglong FU’s team originally proposed a wearable Centaur load carriage walking-assistance robot. Through a distinctive softening elastic coupling mechanism and a human-robot coordinated control strategy, the system achieves dynamic decoupling between assistive force generation and balance regulation, enabling the robot to simultaneously exhibit high load capacity and high locomotion agility. Experimental results demonstrate that the robot can reduce human walking metabolic cost by up to 35%, offering a novel and highly efficient solution for load carriage walking assistance.
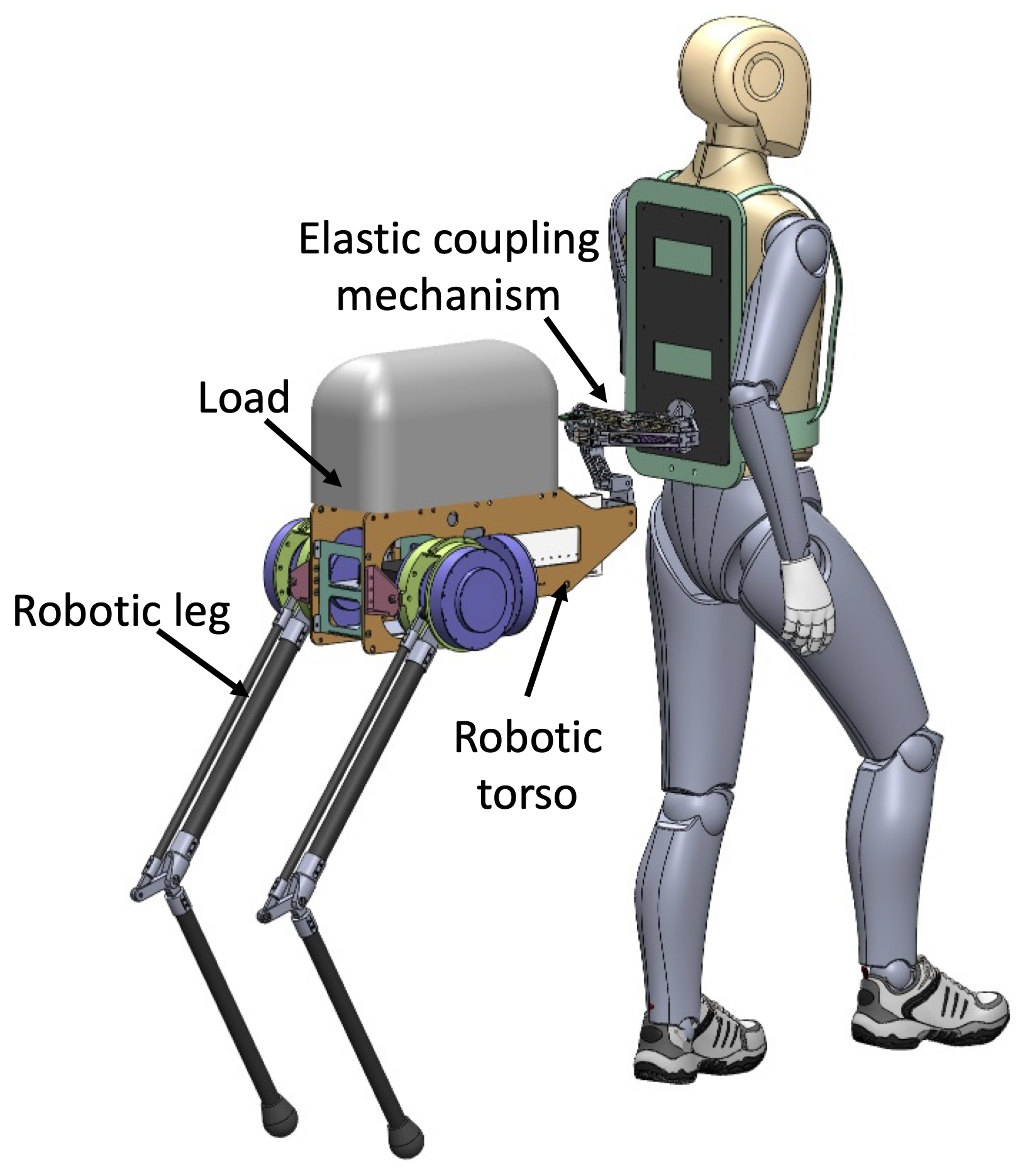
Figure 1. The wearable Centaur robot
Beyond conventional configurations: a novel paradigm of human-robot integrated quadrupedal system
FU’s team drew inspiration from load carrying quadrupeds in nature and proposed a novel collaboration paradigm. Instead of rigidly paralleling the human legs, the robot is coupled with the human back through a shared backplate interface as independent limbs. This configuration forms a hybrid quadrupedal system that synergistically integrates human intelligence with robotic strength to assist load carriage walking. It preserves the human’s decision-making capability in complex environments navigation while enabling the robot to carry the majority of the payload and apply forward horizontal assistance during walking.
Coordinated walking and interaction are enabled by an elastic coupling mechanism and collaborative control
To address the challenge of complex human-robot dynamic coupling, FU’s team developed a softening elastic coupling mechanism consisting of a diamond-shaped linkage and antagonistic springs. The mechanism exhibits a nonlinear stiffness profile, characterized by high stiffness and response at low output forces and low stiffness and response at high output forces. Such a design enables dynamic decoupling of human-robot dynamics, allowing the robot to maintain stable control as an independent system while precisely applying an assistive force through the interface.
By utilizing the loco-interaction control framework, the Centaur robot can perceive human motion intent in real time and achieve high-precision motion following without any explicit user commands, while maintaining its own balance and simultaneously delivering a stable forward horizontal assistive force to the human user.
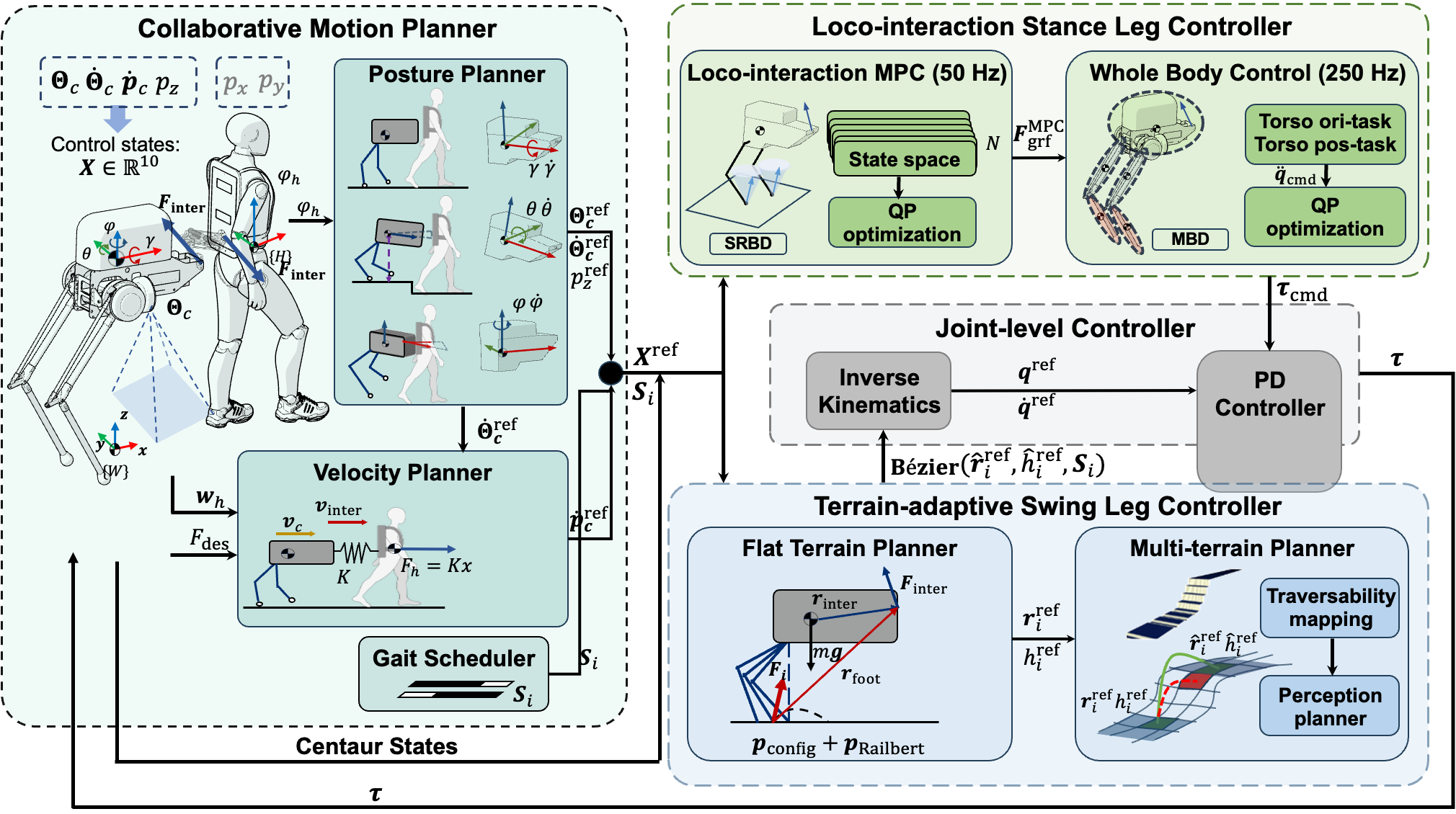
Figure 2. Overview of the loco-interaction control architecture for the Human-Centaur system
Comprehensive Experimental Evaluation: From Agile Locomotion to Effective Load Reduction
Based on the proposed Centaur system, FU’s team conducted a comprehensive, multi-dimensional experimental evaluation. In terms of mobility, the robot demonstrated exceptional agility and terrain adaptability: it completed continuous figure-eight walking between cones spaced only 1 m apart, and leveraging vision-based perception, autonomously planned its foothold to smoothly traverse stairs, slopes, and complex outdoor terrains.

Figure 3. The Centaur robot walking in real-world environments while providing assistive force to multiple subjects.
In the load carriage performance assessment, the results indicate that the Centaur robot can share an average of about 52.22% of the load vertical pressure and significantly reduced the metabolic cost by approximate 35.16%, when subjects walked while carrying a 20 kg payload (approximately 29% of body weight). Human gait analysis revealed that the human-centaur system significantly reduced the step width variability, which showed no significant difference from that observed during unloaded walking. These findings indicate that the Human-Centaur quadrupedal configuration effectively mitigates gait disturbances induced by load carriage, and the robot’s horizontal assistive force did not compromise human balance; instead, it significantly improved lateral walking stability. Such results collectively validate the high energy efficiency of the proposed composite assistance paradigm that integrates vertical load sharing with horizontal CoM (center of mass) assistance.
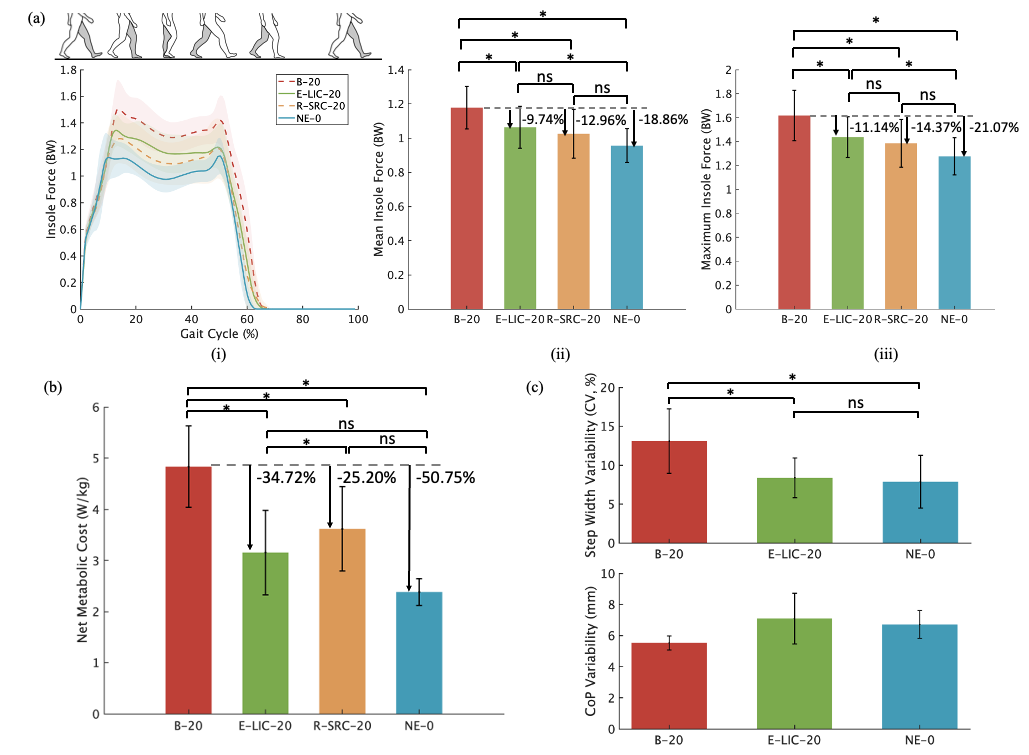
Figure 4. Load carriage experiment results of the Human-Centaur system
Toward Broader Future Applications of Human-Robot Integrated Systems
This study extends the design boundaries of load carriage walking-assistance robots at the level of system paradigm, challenging the conventional assumption that exoskeletons must adhere to a strictly anthropomorphic form. Unlike conventional legged exoskeletons, the proposed Human-Centaur system is built upon the principle that humans are responsible for environmental perception and motion decision-making, while the robot undertakes load bearing and forward assistance, thereby forming a human-robot integrated quadrupedal load carriage configuration. Under this paradigm, the robot not only shares the vertical component of the external load but also delivers stable forward assistance along the direction of the human’s CoM motion during walking, enabling a more direct compensation of the propulsive work required for load carriage locomotion and improving both the efficiency and sustainability during walking.
From an application perspective, the robot is well-suited for scenarios such as emergency rescue and material transportation, field inspection and exploration, and logistical support in complex terrains, with the potential to help users surpass physiological limitations in challenging environments. By organically integrating human adaptability and decision-making advantages in unstructured settings with the load carriage and ground-interaction capabilities of legged robots, the system offers a fundamentally new approach to load carriage walking assistance under demanding environmental conditions.
The co-first authors of this paper are Zhixin TU and Yihao JIANG, both Ph.D. candidates from the Department of Mechanical and Energy Engineering at SUSTech. The corresponding author is Professor Chenglong FU, and SUSTech is the first affiliation of the paper.
Paper link: https://journals.sagepub.com/doi/10.1177/02783649261418155
Proofread ByNoah Crockett, Junxi KE
Photo ByZhixin TU, Yihao JIANG






