The IEEE International Conference on Robotics and Automation (ICRA 2024) recently took place at the Pacific Convention Plaza Yokohama (Pacifico Yokohama) in Japan.
Nine papers from the 423 Lab of the Department of Electronic and Electrical Engineering (EEE) at the Southern University of Science and Technology (SUSTech), including the Shenzhen Key Laboratory of Robotics Perception and Intelligence and the Shenzhen Key Laboratory of Robotics and Computer Vision, were accepted for presentation at the conference.
Under the guidance of Max Q.H. MENG, Chair Professor and Head of the Department of EEE, Hong ZHANG, Chair Professor of the Department of EEE, and Jiankun WANG, Assistant Professor of the Department of EEE, four students gave oral reports on hot topics such as robot perception, manipulation, navigation, medical robotics, and human-robot interaction.


Zhengxuan QIU, a master’s student mentored by Professor Jiankun WANG, presented an oral report entitled “MMA-Net: Multiple Morphology-Aware Network for Automated Cobb Angle Measurement”.
His research introduces a more accurate method for measuring scoliosis angles using multi-morphological information and a unique loss function design, offering valuable insights for clinical diagnosis.
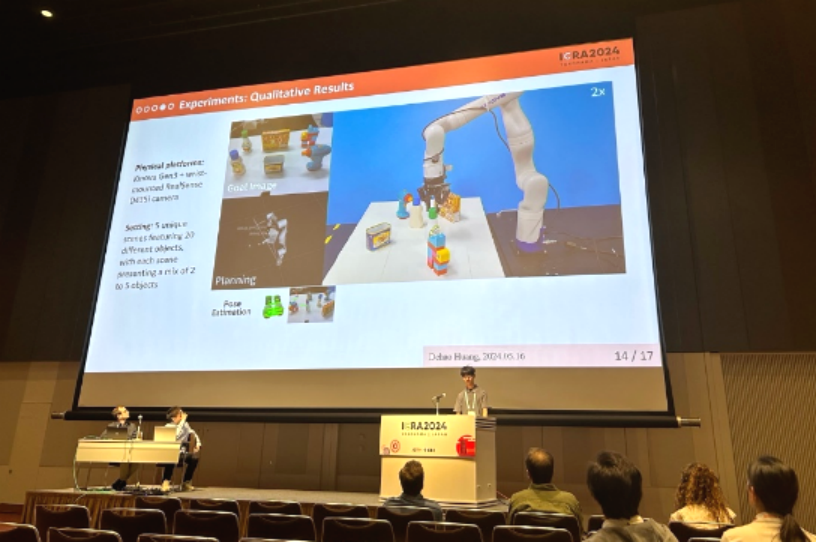
Dehao HUANG, a master’s student under Professor Hong ZHANG, presented a report entitled “Efficient Object Rearrangement via Multi-view Fusion”.
His paper discusses the application of visual rearrangement technique to enhance robots’ multi-view perception, significantly improving their efficiency in tasks like home organization.

Peiyu LUO, a master’s student supervised by Professor Max Q.H. MENG, presented his report entitled “Efficient RRT*-based Safety-Constrained Motion Planning for Continuum Robots in Dynamic Environments”.
He proposed an innovative motion control method for continuum robots that incorporates safety constraints, enabling autonomous navigation and obstacle avoidance in dynamic environments.

Chao TANG, a doctoral student under Professor Hong ZHANG, presented his paper entitled “GraspGPT: Leveraging Semantic Knowledge from a Large Language Model for Task-Oriented Grasping”.
His work investigates the use of artificial intelligence models to enhance the generalization of robotic arm grasping algorithms, facilitating autonomous and intelligent decision-making and interaction for service robots in open home environments.
The IEEE ICRA is a flagship conference in the field of robotics and automation, bringing together leading experts and scholars worldwide to showcase the latest technological advancements and research findings.
The event featured plenary reports, keynote reports, paper presentations, workshops and tutorials, forums, exhibitions, competitions, and various networking opportunities, providing a platform for participants to exchange ideas, share research results, and explore future development directions.
Proofread ByJiankun WANG, Adrian Cremin, Yingying XIA
Photo ByDepartment of Electronic and Electrical Engineering