VRPAY眼镜、人造卫星互动体验、家庭服务机器人……2016年全国“大众创业、万众创新”活动周于10月12日在深圳拉开帷幕,全球各地的创客们通过双创周尽情展示风采。双创周主题展示于10月12-18日在深圳湾创业广场中西区举行,展览以“与深圳同创造(CITY OF MAKERS)”为主题,展览面积超过16000平方米,南方科技大学“创客车间”的五个团队也应邀参展。
双创周主题展现场

“双创周”南方科技大学展位

现场讲解学生创客作品
为参加此次展示,我校“创客车间”的学生创客团队积极申报。经过筛选,共有五个学生项目成功入围,分别是:Artinx机器人战队研发的第一人称视角射击战车;2012级李佳根同学研发的基于离子液体的新型二氧化碳传感器;2013级汤凯栾同学研发的高集成度的近场毫米波实时全息成像系统;2015级卢睿同学研发的MINI-3D打印机;2016级黄万款同学研发的遥控智能时钟。

第一人称视角射击战车
其中,第一人称视角射击战车为参加 RoboMasters 机器人赛事而设计制造,是一个搭载两轴云台的可全向移动的机器人,具有小巧灵活的机动性,第一人称视角的操作方式也使移动范围更广。
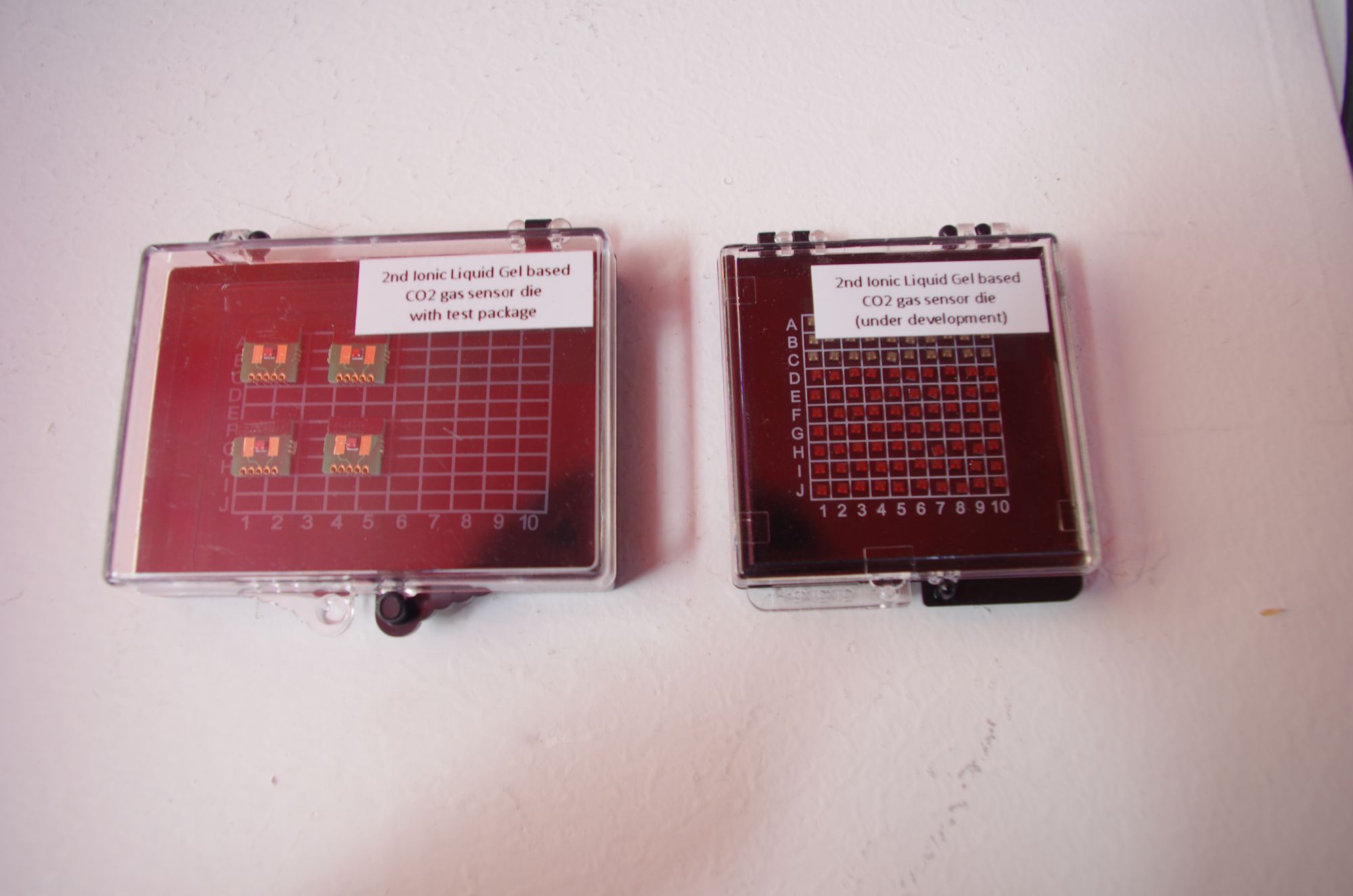
基于离子液体的新型二氧化碳传感器模组
基于离子液体的新型二氧化碳传感器模组是利用离子液体在不同二氧化碳浓度环境中电导率发生改变的特性,设计并制作了基于氟化咪唑离子凝胶的低能耗二氧化碳传感器。
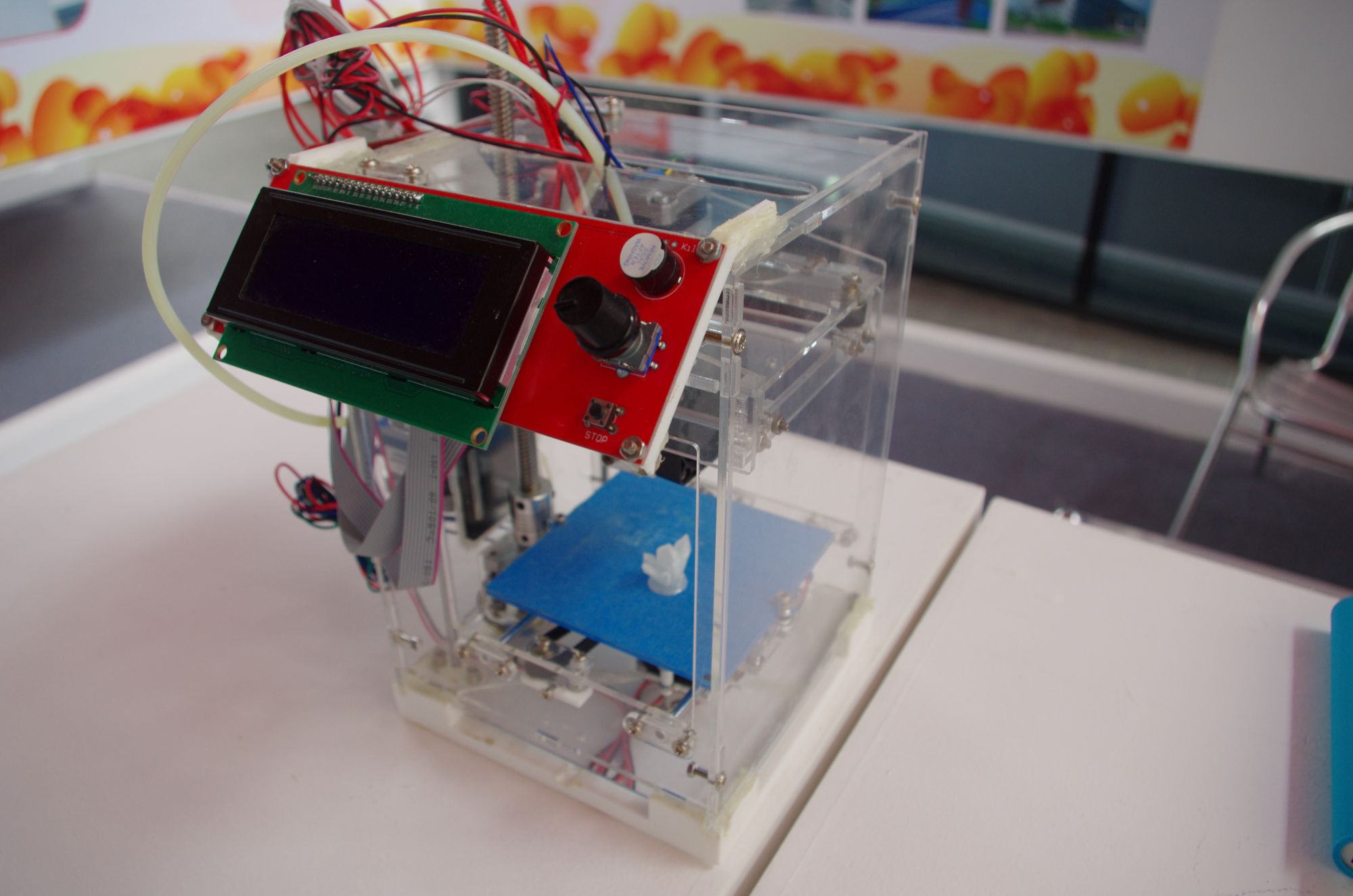
MINI-3D打印机
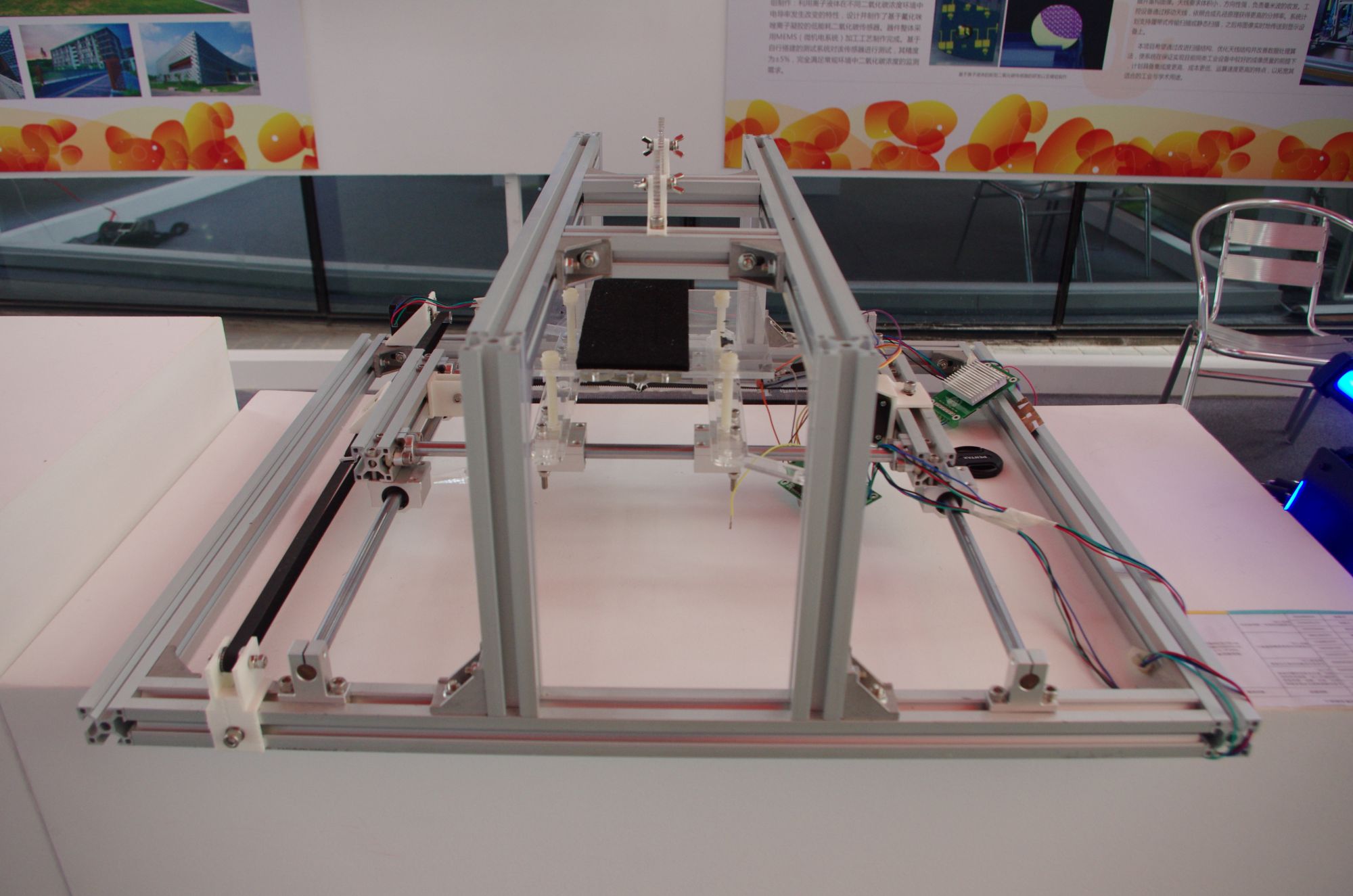
高集成度的近场毫米波实时全息成像系统

遥控智能时钟
现场参展商对我校学生参展作品给予很高的评价,希望3d打印机、智能显示技术等能够尽快商业化,同时希望多多加强与我校合作并开展产业孵化。
除了本次双创周的活动,“创客工厂”在校内也多次举办创新类相关活动,为学生们提供了创新创业的平台,帮助学生实现技术转移,学生参与度很高。
背景资料:
1、南方科技大学创客车间介绍
南方科技大学创客车间是由学生工作部和树德书院共同建立的用于鼓励在校学生创新创业的平台,创客车间采用社团入驻的运营方式,现由3D打印社、Artinx机器人战队、航模社等学生创客社团共同参与管理和运营。

南方科技大学创客车间
入驻创客车间的学生创客团队参与申报了2015-2016年度深圳市科技创新委员会专项资金大学生个人创客项目,共有4个项目获得资助,共获资助资金35万元,在2016-2017年度深圳市科技创新委员会专项资金大学生个人创客项目申报中,又有12个项目获得深圳市科创委的资助,共获资助资金157万元。除此之外,入驻南方科技大学创客车间的学生创客社团已经连续参加两届由团中央及大疆创新科技有限公司联合举办的“2016 robomaster全国大学生机器人比赛”,“全球创客马拉松”等多项赛事。
2、参赛作品介绍
(1)第一人称视角射击战车
该产品为参加 RoboMasters 机器人赛事所设计制造的一款第一人称视角射击战车,是一个搭载两轴云台的可全向移动的机器人。战车具有小巧灵活的机动性,第一人称视角的操作方式也使移动范围更广。同时,战车的电控采取了模块化的方案,简化的电路可以避免线材的杂乱,且在出故障时可以方便问题的排查与解决。另外,战车的底盘使用了通用化和易用的设计,可以方便的和其他机械臂或设备组合成为拥有特殊功能的机器人小车,进而满足不同的需求。
(2)基于离子液体的新型二氧化碳传感器模组
基于离子液体的新型二氧化碳传感器模组是利用离子液体在不同二氧化碳浓度环境中电导率发生改变的特性,设计并制作了基于氟化咪唑离子凝胶的低能耗二氧化碳传感器。器件整体采用MEMS(微机电系统)加工工艺制作完成。基于自行搭建的测试系统对该传感器进行测试,其精度为±5%,完全满足常规环境中二氧化碳浓度的监测需求。
(3)MINI-3D打印机
MINI3D打印机的整体结构为Corexy型,X轴Y轴由步进电机带动同步带移动,Z轴由步进电机带动一根丝杠移动,整体运行十分稳定。控制主板采用了Arduino Mega2560再和RAMPS1.4扩展板嵌合在一块控制板上。内部的固件为Marlin开源固件,Marlin的功能相对复杂、强大,你可以自由设置波特率、控制板类型、挤出机喷嘴个数、打印机的各轴的运动行程、运动速度、运动单位距离所需要的脉冲数等,因此是目前市面上大多数3D打印机的首选固件。由于它的尺寸,差不多比一个成人手掌大不了多少,因此非常便携,您甚至可以将其随身携带。
(4)高集成度的近场毫米波实时全息成像系统
本项目的目标是设计研发一套工作在60GHz左右,具有分辨率和稳定性保证的高集成度、低成本的主动式近场毫米波实时全息成像系统。系统主要分为中央处理设备、毫米波源、毫米波收发天线和工控设备。中央处理设备负责处理接收到的数据并重构图像。天线要求体积小,方向性强,负责毫米波的收发。工控设备通过移动天线,依照合成孔径原理获得更高的分辨率。系统计划支持履带式传输扫描或静态扫描,之后将图像实时地传送到显示设备上。
(5)遥控智能时钟
本项目由8个IV11荧光管组成,荧光管底座配有全彩的灯珠,使时钟在显示上更加生动,颜色更加迷人出现,当荧光管遇上时钟时,使其更富有年代气息,配上现代的电路设计可谓是时代之间的交流与碰撞。
IV11荧光管产自前苏联,因其独特的外形、高真空度、高亮度且存有量少而非常珍贵,作为一个收藏品也是不二之选。
供稿:学生工作部 树德书院
主图图片: 韩方舟





南方科技大学微信

南方科技大学视频号

南方科技大学抖音号

南方科技大学快手号

南方科技大学头条号

南方科技大学南方+




