
如果有一天,身上穿戴的假肢也能感觉到疼痛,这一定是一件奇妙的事情。

事实上,穿戴的假肢能像正常的肢体一样感受到外界的各类刺激,甚至能获得比正常肢体更灵敏的感知能力——这种“神奇事件”即将在人类世界发生,其奥妙在于科学家正在研究的电子皮肤。
那么,电子皮肤离我们还有多远,又将会给人类社会带来哪些方面的变革呢?
“电子皮肤”VS人类皮肤
皮肤是人体最大的器官,它包覆在人体表面,除了具有保护、排泄和调节体温的作用外,还能感受外界刺激,因此是人体和外界进行交互的重要器官。皮肤通常由表皮和真皮组成,有良好的柔性,还具有自修复性能(图1)。皮肤中分布着多种感应器,从而能够感受压力、应变、振动、温度、湿度等多种外界刺激。皮肤通过对这些外界刺激进行感应,使人体产生了触觉。触觉对人类有重要意义——通过触觉,人体可以规避潜在的危险,或者获得信息。例如,手被木刺扎到,就会自动收缩。婴儿出生之初视力极弱,触觉是婴儿获取外界信息最重要的途径。
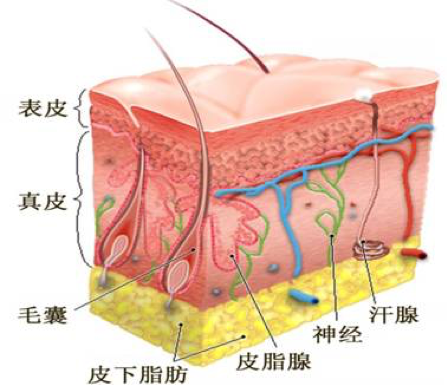
图1、皮肤结构图
随着社会的发展,机器人逐渐走进人类的生活圈。帮助机器人拥有触觉,是人类长期以来的奋斗目标。早在上世纪70年代,人们就开始尝试关于机器人触觉的研究。早期对触觉的研究仅限于压力的传感,传感器的结构简单,检测的灵敏度也十分有限,仅仅能够检测机器手与操作对象是否发生接触。
触觉传感器并非神秘之物,我们的手机触摸屏就是一种简单的触觉传感器。近年来,触觉传感器的发展十分迅速,科学家设计了基于多种不同工作机制的器件,包括电容型、电阻型、压电型、摩擦电型等(图2)。
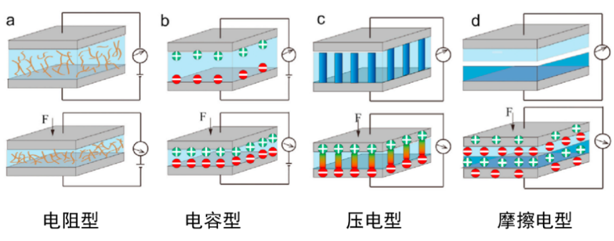
图2、几种典型的触觉传感原理
如今,科学家的研究成果已经突破了压力传感,新型传感器能够把触觉延伸到对温度、湿度、光强、化学环境等信号的感知,甚至一部分的新型传感器已经超出了人体皮肤的功能范围。例如,一些触觉传感器能够通过可视化显示的方式,非常直观地展现触觉信号的强弱。
传统的触觉传感器和人体皮肤最大的区别在于力学性能上的差异。人体皮肤非常柔软,其弹性模量大约只有100 kPa左右,是塑料的万分之一、金属的百万分之一。皮肤良好的柔性为人类之间、人与环境的安全交互起到了关键作用。通常,硬质材料之间的接触很容易造成材料的断裂,而软材料与硬质外物接触时,接触面积大,应力分布相对均匀,不容易发生损坏。然而,最理想最安全的选择是软材料之间的接触,比如婴儿和母亲之间的接触就属于这种类型(图3)。因此,软体的触觉传感器的研究成为了科学研究的主流方向。

图3、软材料的接触比硬材料更安全、更容易为人类所接受
“柔性电子皮肤”将带来更多可能
未来的服务机器人或者可穿戴机器人(例如假肢)将具有和人类皮肤相似的表皮——柔软而有触觉。这需要科学家开发一种可贴附在机器人表面的电子皮肤(图4)。当然,这是一个非常艰巨的任务。
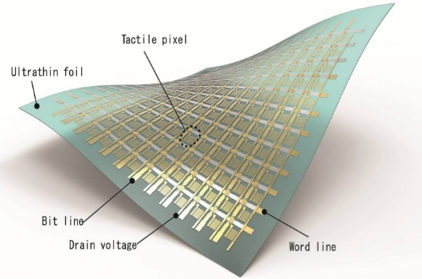
图4、一种电子皮肤蒙皮示意图
人体皮肤的触觉感应器种类繁多,不同种类的感应器在不同的深度,密度可达10-100个/cm2,这对电子皮肤的加工和集成提出了极高的要求。传统的触觉传感器是一种多层结构,单个器件面积大,很难实现器件的微型化和高密度集成。对多种外界刺激的传感需求进一步增大了电子皮肤研发的难度。此外,多层结构在较大的形变下容易发生分层断裂,因此这种结构不太适合用于柔性皮肤。
与之相比,多喷头的3D打印技术可能是未来制造高阵列密度、高可靠性电子皮肤的重要技术。通过一体化成型的方式,3D打印可制备大面积全有机可拉伸的电子皮肤。可以想象,未来的肢体残疾人士将会穿戴一种功能非常强大的假肢:它能采集和分析肌电信号,帮助假肢完成复杂的操作;还能采集到丰富的触觉信号,最终把触觉信号传递到人的大脑,使肢体残疾人士重新获得触觉,其社会意义不可估量。
图5、电影《机械姬》中机器人面部穿戴着柔性皮肤
想象一下,如果未来智能的机器人穿上类似于人体皮肤的柔性电子皮肤,你还能轻易分辨出未来的智能机器人吗?
柔性电子皮肤除了可让机器人获得触觉外,还在健康医疗和运动分析领域有着广泛的应用(图6)。例如,在内窥镜导管或者介入手术导管的尖端植入电子皮肤,可检测组织的刚度,进而可调节不同位置的手术方案。例如,贴附在人体表面的电子皮肤或者穿着在体表的智能衣可检测人体的脉搏、心跳、呼吸等生理信号,以及丰富的运动信号,判断人体健康程度。其中对运动信号的监测能帮助运动员分析动作特点,改进不良动作,预防职业伤病,并提高竞技水平。我国著名篮球运动员姚明由于脚部的应力性骨折严重影响了其职业生涯,如果有一种智能鞋垫能长期监测其脚底压力,就可以预测伤病发生的风险,延长运动员的职业生涯。

图6、用于健康和运动监测的可穿戴传感器
电子皮肤将引发“触觉革命”
除了对人体本身和机器人领域,未来电子皮肤还可广泛应用于工业领域。比如航空领域,为了获得稳定的飞行结构,需要对飞行器进行大规模的风洞实验,测试飞行器模型的表面压力等信息。常规的方法是在飞行器模型上打孔,嵌入硬质的压力传感器,并通过引出电缆测试压力信号。然而在一个普通的飞机模型上就需要安装1000多个传感器,这使得机体的加工十分复杂。此外,传感器安装之后,飞行器模型的重心往往会发生变化,从而影响到测试结果。如果在飞机表面贴上一层超薄的柔性电子蒙皮(蒙皮中分布着柔性压力传感器阵列),通过无线信号将实时测得的压力值传送到接受装置并进行数据分析,这将使风洞测试变得十分简单和便捷。
当然,这对传感器的要求极高,特别是高压风洞实验要求压力传感器能精确测量四个大气压范围内的压力变化,且在高压下的压力的分辨率达到10 Pa量级。目前的柔性传感器无法达到这种要求。一般来说,柔性压力传感器在压力很小的情况下压力分辨率较高,在高压环境下的压力分辨率则迅速下降。人体皮肤也有类似的性能:人的手掌能感受到一只小昆虫;然而当手上托着重物,昆虫再飞到重物上时,皮肤则无法分辨昆虫带来的微小压力变化。因此,发展在高压区具有高灵敏度的电子皮肤将是未来科学研究的一个重要方向。
电子皮肤的应用远远不止于以上所提及到的例子。这种新型的电子器件将会获得越来越多的关注并迅速产业化,有望彻底改变人们的生活方式,引发一场“触觉革命”。
参考文献:
1. Yongbiao Wan et al. Recent progresses on flexible tactile sensors. Mater. Today Phys. 2017, 1, 61-73.
2. Dae-Hyeong Kim et al. Epidermal electronics. Science 2011, 333, 838-843.
3. Gang Li et al. Fully Organic and Intrinsically Stretchable Skin-like Electronics. ACS Appl. Mater. Interfaces. 2019, 11, 10373–10379.
4. Sihong Wang et al. Skin electronics from scalable fabrication of an intrinsically stretchable transistor array. Nature 2018, 555, 83-88.
5. Junlong Yang et al. Ionic Liquid Activated Wearable Electronics. Mater. Today Phys. 2019, 8, 78-85.
作者简介:

郭传飞,南方科技大学材料科学与工程系副教授。主要研究领域为柔性电子学、智能软体机器人、非常规微纳米加工等。已在Nature Communications、PNAS、LSA、JACS、Advanced Materials、Nano Letters、Advanced Functional Materials、Materials Today、ACS Nano等学术期刊上发表论文90多篇。申请专利24件,已获中、美、日等国专利授权13件,其中包括美国专利授权3件。参与编写英文专著一部。关于柔性电子学方面的研究成果被New York Times、新华网、Science Daily、Materials Today、Physics Today等新闻媒体与科技刊物广泛报道。主持和参与广东省珠江人才计划“引进创新创业团队”、国家自然科学基金重点项目、国家自然科学基金面上项目、深圳市基础研究学科布局等项目。
作者:郭传飞
编辑:苗雪宁
图片:郭传飞 部分图片来源于网络
视频:叶茹诗 郑艺俊
主图设计:丘妍





南方科技大学微信

南方科技大学视频号

南方科技大学抖音号

南方科技大学快手号

南方科技大学头条号

南方科技大学南方+




