近日,南方科技大学机械与能源工程系、机器人研究院王宏强副教授与材料科学与工程系汪宏教授团队合作,研制出一种超强静电吸附装置。相关研究以“ Electrostatic Adhesion Clutch with Superhigh Force Density Achieved by MXene-P(VDF-TrFE-CTFE) Composites”为题发表在机器人领域顶级期刊Soft Robotics。

静电吸附由于具有质量轻、柔性好、功耗低等优势,在机器人、可穿戴设备以及虚拟现实等领域具有广泛的应用前景。典型的静电吸附器由两个导体电极以及电极中间的介电层组成,形式上与电容相同。介电层的介电性能决定了静电吸附力,介电性能主要取决与材料的两个参数:介电常数和击穿场强。以前的研究大多针对如何提高介电材料的介电常数,但是高介电常数材料往往具有较低的击穿场强,对静电吸附力的提高较为有限,对于很多应用领域,高力密度的静电吸附器仍然是迫切的需求。
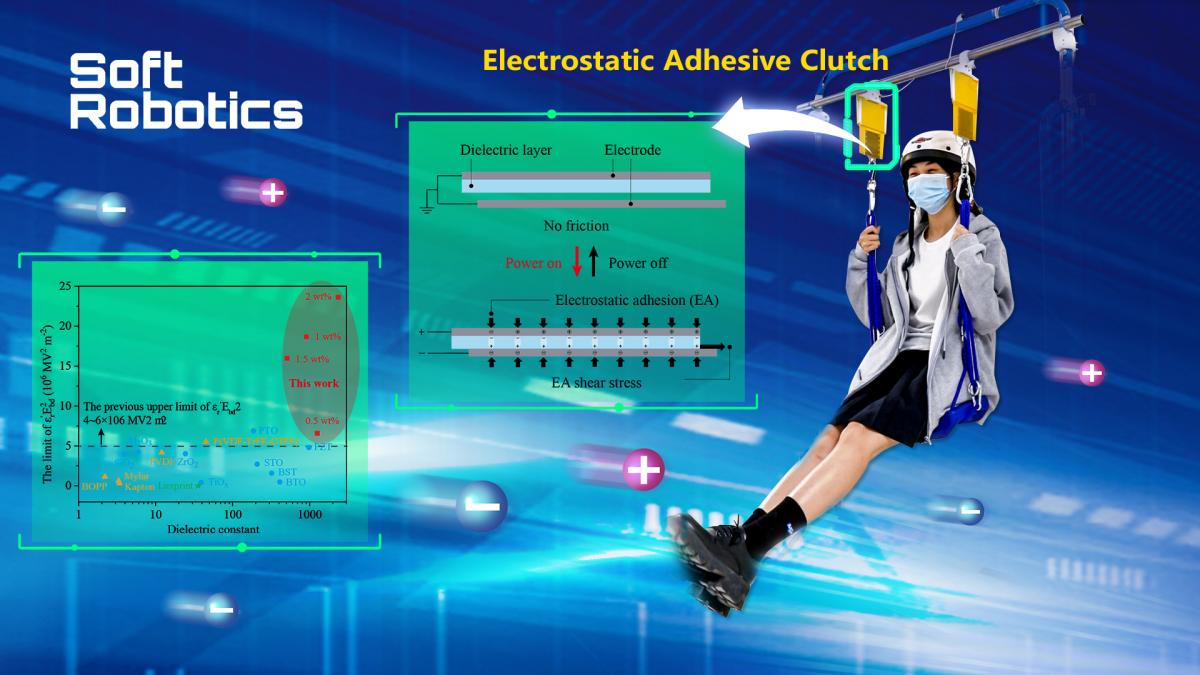
因此,研究团队通过混合一定比例的二维材料MXene(2wt%)到三元聚合材料P(VDF-TrFE-CTFE)中,制作出一种能在较低电压下,产生高达85.61 N cm-2静电吸附力的吸附器,相比文献中最大值提高了近4倍,比常规静电吸附抓装置提高了十多倍。此外,整个静电离合器厚度仅为160 μm, 重量0.4 g, 功率仅为563.55 mW cm-2。

图1 静电吸附器的原理及关键参数与其他材料相比
研究人员通过实验测定了不同比例的二维材料和三元聚合物的介电性能:介电常数、击穿场强、介电损耗等数据。实验发现温度能极大影响介电材料的性能,因此本项研究研制出了一种温度可调节的静电吸附装置,只需要0.32 cm2的接触面就能拉起2.5 kg的重物。研究人员用该静电吸附装置制作出一个秋千,能够支撑一个45kg的成年人,进一步展现了该静电吸附材料和装置的强大性能。此外,研究人员还利用该离合器配合旋转的金属轴制作出一款多指机器手爪,实现了抓握功能。

图2 静电吸附装置的性能展示
该研究由南方科技大学独立完成。南科大机械与能源工程系/机器人研究院研究助理魏岱岳、熊泉为论文共同第一作者,南科大博士后董久峰、 2021级硕士研究生王华岑、2019级硕士研究生梁轩铨、2021级硕士研究生唐诗雨等人为共同作者,通讯作者为王宏强、汪宏,南科大为论文第一单位。该项目由国家自然科学基金、广东省自然科学基金等资助。
文章链接:https://www.liebertpub.com/doi/abs/10.1089/soro.2022.0013
供稿:机械与能源工程系





南方科技大学微信

南方科技大学视频号

南方科技大学抖音号

南方科技大学快手号

南方科技大学头条号

南方科技大学南方+




