近日,南方科技大学机械与能源工程系副教授王宏强团队在气动软体旋转执行器领域上取得新进展, 相关成果以“Origami-inspired soft twisting actuator” 为题发表于机器人领域期刊的Soft Robotics (SoRo)。
 软体机器人对环境有高度的适应性,同时,在与人机交互方面,软体机器人相比传统的刚性机器人具有本质上的安全性。虽然近年来虽然软体机器人的弯曲、膨胀和收缩运动已被广泛研究,但是缺乏旋转驱动方式,从而导致目前软体机器人设计缺乏轴向这一关键方向的有效驱动,导致缺少机器人运动自由度,缺失部分运动空间,成为目前软体机器人设计中的一大痛点。
软体机器人对环境有高度的适应性,同时,在与人机交互方面,软体机器人相比传统的刚性机器人具有本质上的安全性。虽然近年来虽然软体机器人的弯曲、膨胀和收缩运动已被广泛研究,但是缺乏旋转驱动方式,从而导致目前软体机器人设计缺乏轴向这一关键方向的有效驱动,导致缺少机器人运动自由度,缺失部分运动空间,成为目前软体机器人设计中的一大痛点。
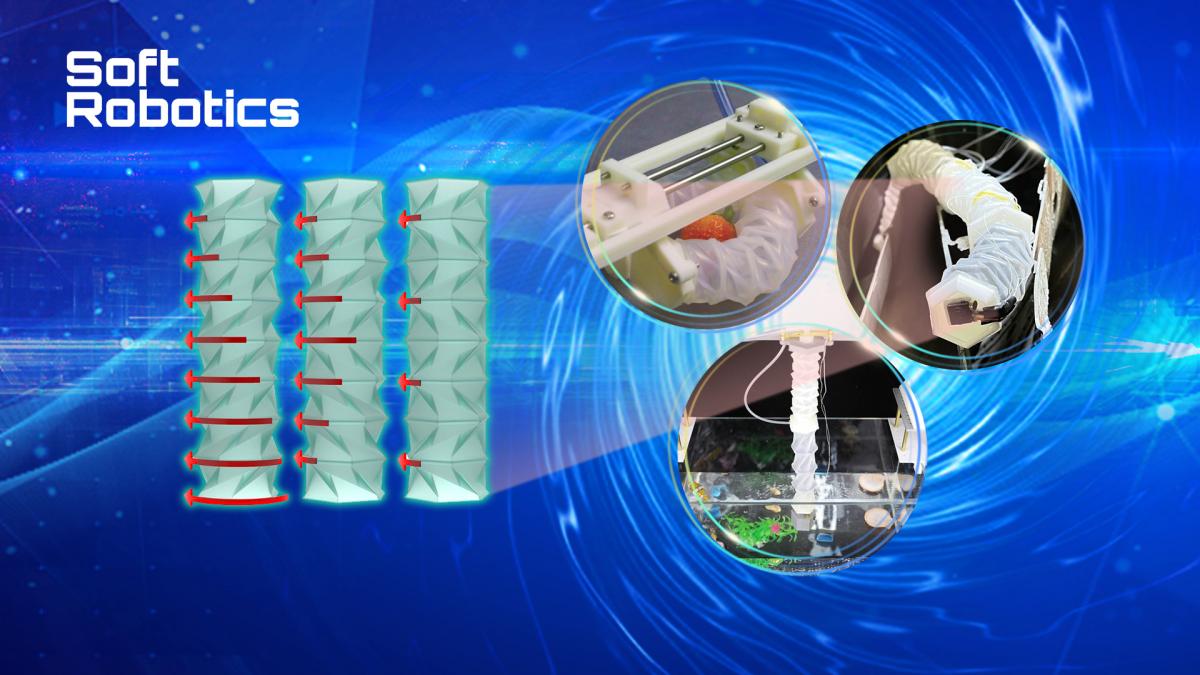
尽管目前部分学者进行了研究。但是现有的软体旋转执行器普遍存在旋转角度小,旋转效率低的问题。针对该问题,本课题组基于折纸理论的启发,在传统的硅胶层上引入Kresling折纸构型,设计并制造了一类折纸结构启发的软体执行器(origami-inspired soft pneumatic actuators (OSPAs)),其旋转角度可以达到435度,这也是目前已知的所有软体气动执行器中可达的最大的旋转角度。

图 1 OSPA执行器构成的三类机器人。
同时在该研究中,研究人员建立了OSPA执行器的分析模型,并对设计参数进行了参数化分析,分析了折转角度、尺度、形状等对于旋转角度和扭矩的耦合关系,并最终进行了参数优化设计,从而实现最大的旋转角度。基于柔性体的动力学模型,作者还建立了气压和旋转角方面的关系。除此之外,研究人员还对OSPA执行器进行了拉伸和压缩试验、承重试验、寿命测试和冲击试验,结果充分证明了其相对于纸基结构的优越性。
 图 2 建立的分析模型
图 2 建立的分析模型
研究人员将OSPA执行器集成到了三类机器人中:第一个原型机器人是具有手内操作(In-hand manipulation)能力的软机械手,能够实现在抓取脆弱的物品(如樱桃番茄)和薄膜(如一张纸)。同时将物体“滚入”机械手内部,以实现稳定的抓取行为。第二个原型是一个多功能的模块化的机械臂,它既可以与一个摄像头相连,通过改变摄像机的姿态和视角,以全方位监视一条在水中随机游动的机器鱼。或是在机械臂自由端安装一个吸盘,基于软执行器的收缩、膨胀和扭曲运动,这个软机械臂可以成功地将物品拣选并放入相应的槽中。第三个蛇形机器人的原型则展示了其在管道中的顺应性运动,以及受益于OSPA的旋转运动而产生的头部旋转的功能,旋转的头部可以灵活的调节摄像头的角度并进一步引导蛇形机器人进入不同的出口。

图 3 蛇形机器人
南科大为论文第一单位。王宏强课题组科研助理李典成为第一作者,通讯作者为王宏强。该项目由国家自然科学基金、广东省自然科学基金等资助。
论文链接:https://doi.org/10.1089/soro.2021.0185
供稿:机械与能源工程系
通讯员:邓苏
主图:丘妍
编辑:朱增光





南方科技大学微信

南方科技大学视频号

南方科技大学抖音号

南方科技大学快手号

南方科技大学头条号

南方科技大学南方+




