近日,我校机械与能源工程系教授王峥课题组在特种软体机器人研究领域取得最新研究进展,开发的耐压增强型软体机器手顺利通过500kV交流、±1000kV超/特高压耐压试验,为首例。
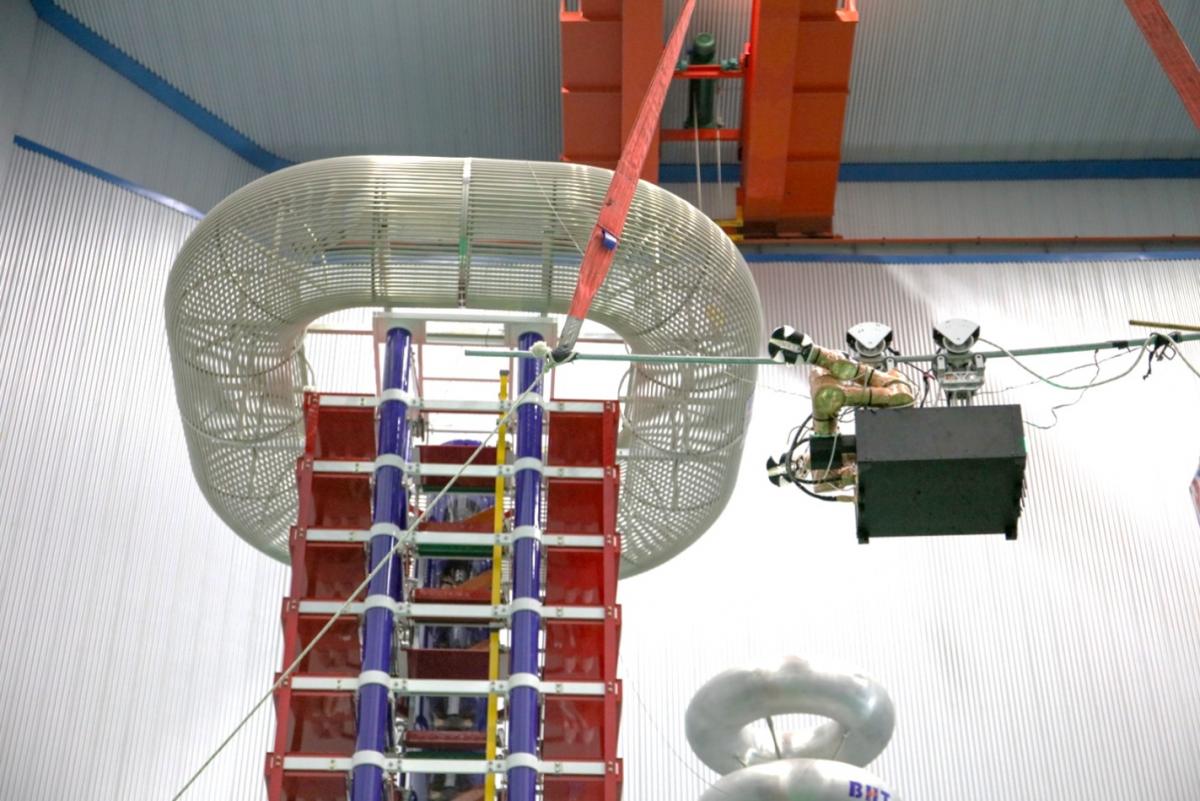
 搭载耐压增强型软体机器手的KRV带电作业机器人在1000kV特高压测试现场
搭载耐压增强型软体机器手的KRV带电作业机器人在1000kV特高压测试现场
软体机器人技术是近年来机器人领域最为热门的研究领域之一。由于软体机器人具有天然的柔性、自适应性、低成本和被动安全性,在人机交互、医疗服务等领域具有非常广泛的应用前景。同时,软体机器人的研究涉及软材料、机构设计、仿生学、微电子、控制和计算机科学等多个相关学科。
由于软体机器人通体采用柔性材料加工制造,采用流体驱动,远端控制,其执行端和运动发生端天然隔离,因此通过系统性的设计和优化,可以很好地实现轻量化、抗干扰、低成本的可更换本体,与控制和运动发生端进行区分。这给软体机器人在特种极端环境,包括高压输电线路带电作业的应用带来优势。

本次测试的面向带电作业的耐压增强型软体机器手
高压/超高压输电线路是连接电网城际节点的重要输电线路,在我国和全世界范围内具有海量的保有量。2020年我国高压/超高压输电线路总里程预计将超过100万公里,相当于绕地球赤道25次,或地球到月球距离的2.6倍。同时,我国不断增长的工业和社会用电需求带来了现有线路的高负荷运行,对电网输电的高可靠性和不间断运行带来了巨大的挑战,不停电的带电检修作业成为了日益迫切的实际需求。现有的输电线路的巡视、检修和维护均以人工为主要手段进行,投入大、工作条件艰苦、人员安全风险高。庞大的输电线路存量带来了巨大的运维需求,带电作业检修的机器人化、自动化成为发展趋势。
现有的电力机器人以变电站地面巡检机器人为主,架空输电线路运行的巡检机器人主要针对线路巡视,发现潜在故障,对高压线路的带电检修维护操作涉及不多。而现有的高压带电作业机器人解决方案全部使用传统的电机驱动的机器臂和机器爪,系统复杂性及维护成本较高。软体机器人技术的引入将带来操作的简化、工作电压等级的提高和成本的大幅降低。
针对高压/超高压电场的严酷电磁环境,我校仿生机器人与控制实验室将前沿软体机器人技术与电力行业的运检需求相结合,开发了耐压增强型先进软体机器手。该机器手采用柔性聚合物(乙烯/醋酸乙烯酯)和刚性聚合物(聚乳酸)等日常普遍采用的非金属材料制造,通过低压气动驱动,实现多关节(3DOF)灵活运动。同时,通过采用耐压增强处理,该机器手的驱动控制箱可以承受±1000kV特高压电压的严酷环境,并且能够保持自身运作和与外界通讯的稳定。
通过与珠高电气检测有限公司的合作,王峥课题组分别于2020年1月11日和1月13日在珠高检测中心顺利完成了超高压交流和直流耐压试验。通过一台克诺-KRV型超高压带电作业机器人的搭载,两台软体机器手进入超高压试验场,并随着电场电压等级的不断提升,不间断完成一系列预定动作。试验中,交流电压达到了500kV,直流正向和负向电压分别达到了1000kV,机器手顺利通过了全部试验。
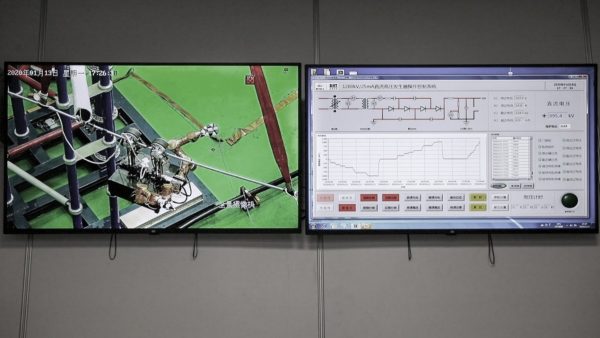
1000kV正向电压的试验现场
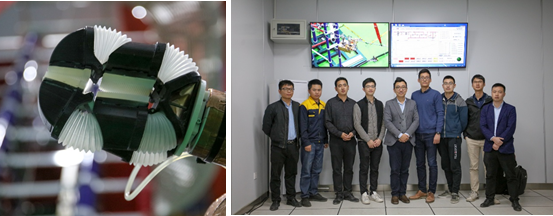
用于试验的软体机器手实物及珠高检测团队合影
课题组人员介绍,本次试验为软体机器人应用于高压输电线路的耐压测试,也是带电作业机器人在直流1000kV电压等级的首次测试。该试验的成功,标志着电力机器人成功覆盖超高压并挑战1000kV特高压极限环境的初步成功,同时也推动了软体机器人技术在电力行业的应用。
本课题工作获得了国家自然科学基金、南方科技大学机器人研究院和教育基金会的大力支持。
供稿:机械与能源工程系
通讯员:邓苏
编辑:苗雪宁





南方科技大学微信

南方科技大学视频号

南方科技大学抖音号

南方科技大学快手号

南方科技大学头条号

南方科技大学南方+




