近日,南方科技大学机械与能源工程系助理教授王宏强课题组在静电薄膜驱动器建模上取得新进展,相关成果以“Modeling and Optimization of Electrostatic Film Actuators Based on the Method of Moments”为题发表在机器人领域顶级期刊之一的《软体机器人》(Soft Robotics)。论文提出了一种全新的建模方法,首次实现静电柔性电机多参数的高密度数据获取、比较和参数优化。

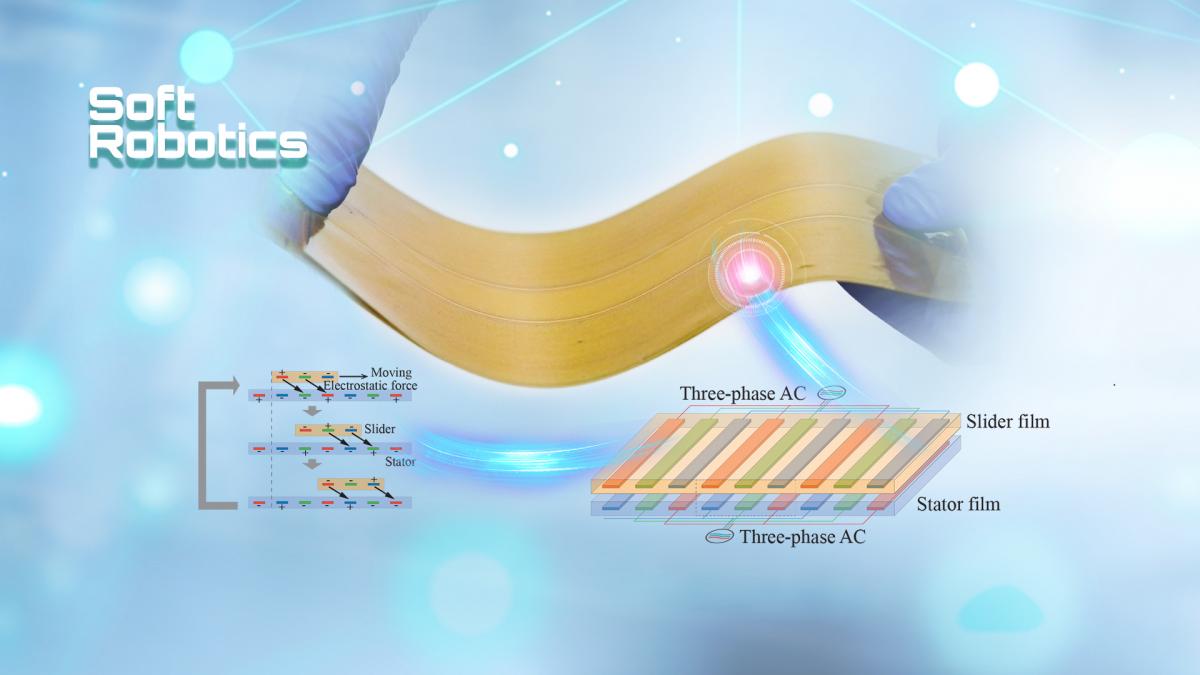
静电薄膜电机是最近几十年来一种新兴的柔性驱动技术,具有柔顺性好、质量轻、成本低等独特优点,在医疗、可穿戴设备、检测、机器人等方面有着广泛的潜在应用前景。如下图1,静电薄膜电机由两片薄膜制成,一片是定子,另一片薄膜是由结构相同的多相电极所组成的滑子。在高压的作用下,静电薄膜中诱导出异种电荷,产生吸引力。当改变静电薄膜电机中的电极极性,滑子相对于定子向前滑动。通过重复此切换顺序,滑子将会连续滑动。相比较大多数软体驱动器(如气动、电活性聚合物),静电薄膜电机有着两个突出的优点:极高的线性移动精度和大行程。

图1. 静电薄膜电机的工作原理。
静电薄膜电机的研究目前还存在诸多方面的挑战。其中一个重要的问题在于静电电机的设计主要是基于经验进行设计,不能像传统电机那样进行基于参数优化的数据驱动设计。该问题源自于数学模型方面的基础研究的不充分。其模型涉及电路、静电场、运动和力的多环节耦合,尤其其中静电场的计算参数多,电场分布复杂,难以计算。目前对于静电电机工作过程中静电场的研究主要基于有限元分析,存在不能一步到位、需分步近似,计算时间长、精度低等问题,导致先前的计算只能近似计算出少量的数据用于定性分析,严重制约了该种电机的设计和优化。
在该研究中,研究人员引入基于线电荷的矩量法method of moments建立了一个完整的静电电机驱动器模型,并通过数学方法获得了初始参数和驱动器性能之间的直接关系。矩量法作为一种用积分方式求解麦克斯韦方程的方法,有效地提高了运算精度,缩短了运算时间。使用此模型,作者分析了多个初始参数,包括电极的宽度和间距及垂直间隙,以进行静电电机驱动器模型的设计优化。MoM-Line模型已由以前的研究数据和作者测试的实验得以验证。通过分析推力与不同电极参数之间的关系,作者针对不同的应用条件获得了更合理的静电电机驱动器模型设计方案和优化方向,并编写了通用的参数选择开源程序。

图2:电极的宽度和间距对输出力的影响。
静电薄膜电机有着广阔的应用前景,特别是那些需要较大行程和高精度位置控制的场合。例如外科手术机器人、可穿戴机器人和巡查机器人。基于该模型,有助于其他科研人员针对不同的应用场景对静电薄膜驱动器进行按需正向设计和制造。
南方科技大学为论文第一通讯单位。王宏强课题组科研助理汪文广为第一作者,王宏强为文章通讯作者。该研究获得了国家青年自然基金、广东省自然科学基金以及重庆科技局重点科技创新基金的资助。
文章链接:https://www.liebertpub.com/doi/full/10.1089/soro.2020.0099
DOI: 10.1089/soro.2020.0099
供稿单位:机械与能源工程系
通讯员:邓苏
编辑:程雯璟
主图设计:丘妍





南方科技大学微信

南方科技大学视频号

南方科技大学抖音号

南方科技大学快手号

南方科技大学头条号

南方科技大学南方+




