Professor Hongqiang WANG and his research team from the Department of Mechanical and Energy Engineering at Southern University of Science and Technology (SUSTech) made a significant breakthrough in the field of humanoid and bioinspired robotics. They successfully developed a novel bone-inspired deformable soft linkage based on pneumatic inflation structures and multidimensional stability mechanisms. Weighing just 350 grams, this linkage can achieve up to 315% extensibility while maintaining excellent load-bearing capacity, structural stability, and compliance. Leveraging this innovation, the team further developed the world’s first lightweight soft humanoid robot, named GrowHR, standing 1.36 meters tall and weighing only 4.5 kilograms, less than 20% of the weight of traditional humanoid robots of similar size.
This groundbreaking research provides a new technological pathway for addressing safety and adaptability challenges in robotics. Potentially bringing robots from industrial use into everyday life, much like the friendly “Baymax” from the popular science fiction movie, Big Hero 6.

It is popularly envisioned that in the future, every household will have a robot to assist with daily tasks, possibly becoming a constant companion. However, the widespread adoption of robots today remains limited. A key reason lies in their heavy weight and rigid structures, which can pose risks to people and surroundings during collisions and are prone to damage themselves. Moreover, these robots struggle to adapt to diverse and complex environments. Inspired by the balance of rigidity and flexibility in the human skeletal system, Professor Wang’s team proposed and developed a bone-inspired deformable structure and growable linkage system (see Fig. 1). The human skeleton is both strong and pliable via joints, capable of absorbing impact energy through micro-deformations. By mimicking these properties and integrating pneumatic expansion with multi-stability design, the team created a new type of mechanism that is both lightweight and robust.
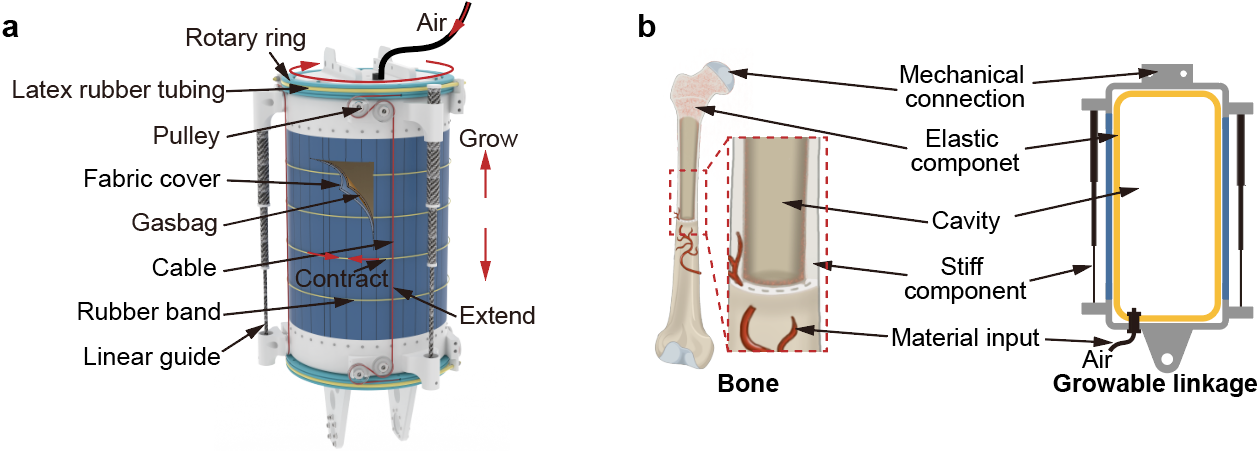
Fig. 1. (a) The structure of the growable linkage. (b) The structure of the growable linkage compared with bone.
Based on this growable linkage structure, the team developed a humanoid robot named “GrowHR,” which not only resembles a human in appearance but surpasses conventional humanoid robots in adaptability and deformability:
Dynamic Shape Adaptation: GrowHR can autonomously reshape its body to navigate constrained spaces. In demonstrations, it compressed its height to 36% to pass through a low opening (Fig. 2a) and squeezed its width to 61% to slip through a narrow gap (Fig. 2b), vastly improving its mobility in complex terrains.
Multimodal Locomotion: Thanks to its growable leg structures, GrowHR can walk like a traditional humanoid, crawl like a worm (Fig. 2c), and enter tight cavities. With a density of just 5.8% that of water, it can float and swim while carrying 16 times its own weight (Fig. 2d). With added fins or mass blocks, it can even walk on water. This significantly extends its application range beyond factories and homes to include rescue missions and water surface tasks.
Lightweight and Air-Droppable: Weighing only 4.5 kg, GrowHR can be deployed over long distances using ducted fans or drones (Fig. 2e), enabling airborne deployment across hundreds of kilometers.
Fig. 2. (a) GrowHR walks out of a small box in the deflated state, then inflates to the full height and walks. (b) GrowHR walks through a narrow gap. (c) The crawling gait of GrowHR. (d) GrowHR swims. (e) Long-distance transportation of GrowHR with a quadrotor.
A major advantage of GrowHR is its intrinsic safety. Traditional robots, due to their mass and rigidity, pose potential danger in accidental collisions. GrowHR, by contrast, is soft and lightweight, significantly reducing the risk of injury. For example, its impact force upon falling is only 1/1.7 that of a rigid robot of the same weight. It is so light that even a 6-year-old child can lift it and can safely engage in various types of interactions (Fig. 3), making it intrinsically safe for humans who may live and interact with it daily.
“Our goal is not only to build capable robots, but also to ensure they can coexist safely with humans,” said a team member. “GrowHR’s intrinsic safety makes it highly suitable for close-contact environments such as homes, healthcare, and education.”
Fig. 3. GrowHR interacts with a 6-year-old child safely. (a) Lightweight GrowHR is lifted by a child. (b) GrowHR falls down and collides with a child safely for both the child and the robot. (c) GrowHR is dragged by a child. (d) GrowHR hugs a child safely.
This research greatly expands the potential applications of humanoid robots. Traditional humanoids designs are often confined to structured environments. GrowHR, with its deformability and multimodal mobility, can adapt from indoor spaces to wild terrains, from household assistance to outdoor search and rescue, and from water surface cleaning to aerial deployment. Imagine a future where every home has a robot like GrowHR—it can navigate tight spaces to retrieve lost items, traverse hazards during emergencies, or perform waterborne rescue in floods and swift water emergencies. Its lightweight and safe design allows humans to interact with it with peace of mind.
This breakthrough offers a new and effective solution for building safer, more capable, and more adaptable humanoid robots. The SUSTech team will continue to innovate robotic technologies to help shape a future of safe, intelligent, and harmonious human-robot coexistence.
This research has been published in Science Advances under the title: “Bioinspired Growable Humanoid Robot with Bone-Mimetic Linkages for Versatile Mobility.” Hao LIU, a PhD student at SUSTech, is the first author. Yanda YANG, Ting WANG, and Jintao YIN are co-authors. Professor Hongqiang WANG is the only corresponding author. The first affiliation is SUSTech.
Proofread ByNoah Crockett, Junxi KE
Photo ByYan QIU






