The team led by Jiansheng DAI, Director of the Institute of Robotics Research at Southern University of Science and Technology (SUSTech), Chair Professor of the Department of Mechanical and Energy Engineering, and Fellow of the Royal Academy of Engineering, in collaboration with the team led by Weimin ZHU, Deputy Director of Shenzhen Second People’s Hospital, proposed an adaptive stiffness visuo-tactile robotic palpation system. This system achieves decoupled characterization for efficient reconstruction of surface microtopography and precise localization of deep lesions, making significant progress in the field of medical minimally invasive robotic perception. The related research results, titled “A Stiffness-Adaptive Visuo-Tactile Robotic Palpation System for Surface Texture Profiling and Deep Lesion Localization,” have been published in IEEE/ASME Transactions on Mechatronics, a top journal in the field of mechatronics and robotics.

With the widespread application of minimally invasive surgical techniques, the limited surgical space and the lack of quantitative tactile feedback pose a serious challenge for doctors to accurately assess the surface texture of lesions and the contours of subcutaneous hard tumors. Researchers have hoped to endow surgical robots with perceptive abilities through flexible sensor arrays and visuo-tactile sensors. However, existing sensor probes struggle to balance the “softness” and “rigidity” necessary for precision sensitivity. Sensor interfaces must be soft enough to achieve high-precision conformal measurement of surface textures while also being sufficiently rigid to penetrate soft tissue to detect deep lesions. This demand for variable stiffness and high-precision perception greatly limits the multiscale perceptual ability of existing robots in complex pathological scenarios.
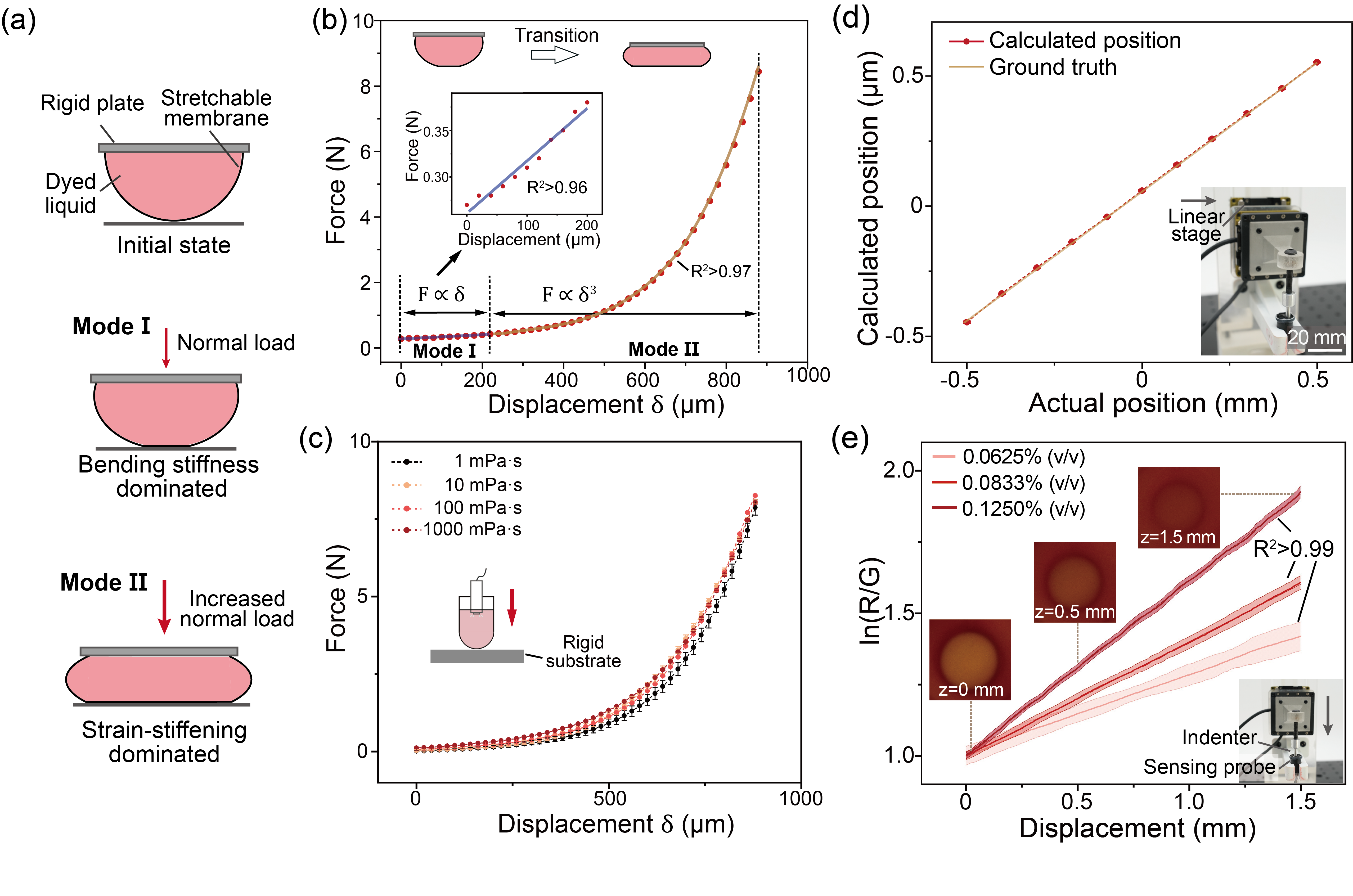
Figure 1. Adaptive stiffness regulation and spatial response of the perception probe
To overcome this technical bottleneck, the research team proposed and developed a miniature adaptive variable-stiffness visuo-tactile sensing probe (10 mm in diameter) based on a fluid-structure interaction mechanism, along with a corresponding robotic palpation scanning system. The probe consists of an optical endoscope, dyed fluid medium, and a double-layer silicone membrane. Utilizing the incompressibility constraint of the fluid, the super-elastic silicone membrane interface exhibits strain-hardening behavior, with equivalent stiffness increasing up to 470 times as the pressing depth increases. The probe has two interaction modes; a low-stiffness mode for surface morphology scanning, and a high-stiffness mode for deep tissue detection, and by combining the proposed spectral filtering principle and the spherical-to-rectangular coordinate conversion algorithm, the system achieves decoupled computation of in-plane spatial features and axial depth.

Figure 2. High-Precision 3D Reconstruction of Surface Texture
To evaluate the clinical performance of this perception system, the research team conducted quantitative characterization tests and ex vivo tissue experiments. The results showed that the system demonstrated high-precision 3D reconstruction capabilities, with average absolute errors in the Z-axis (depth) and XY plane (in-plane) of 28 μm and 3.1 μm, respectively. During continuous dynamic scanning, the system not only reconstructed microscopic surface textures with feature sizes of 150 μm but also accurately measured the boundaries of subcutaneous tumor models with complex stellate and lobulated shapes, achieving a sensitivity exceeding 0.92. The team verified the clinical potential of the system on ex vivo porcine liver models. By integrating light touch and deep pressure data, the platform successfully decoupled multilayer pathological features and precisely distinguished superficial fibrotic lesions from hidden subcutaneous nodules under dynamic perturbation.
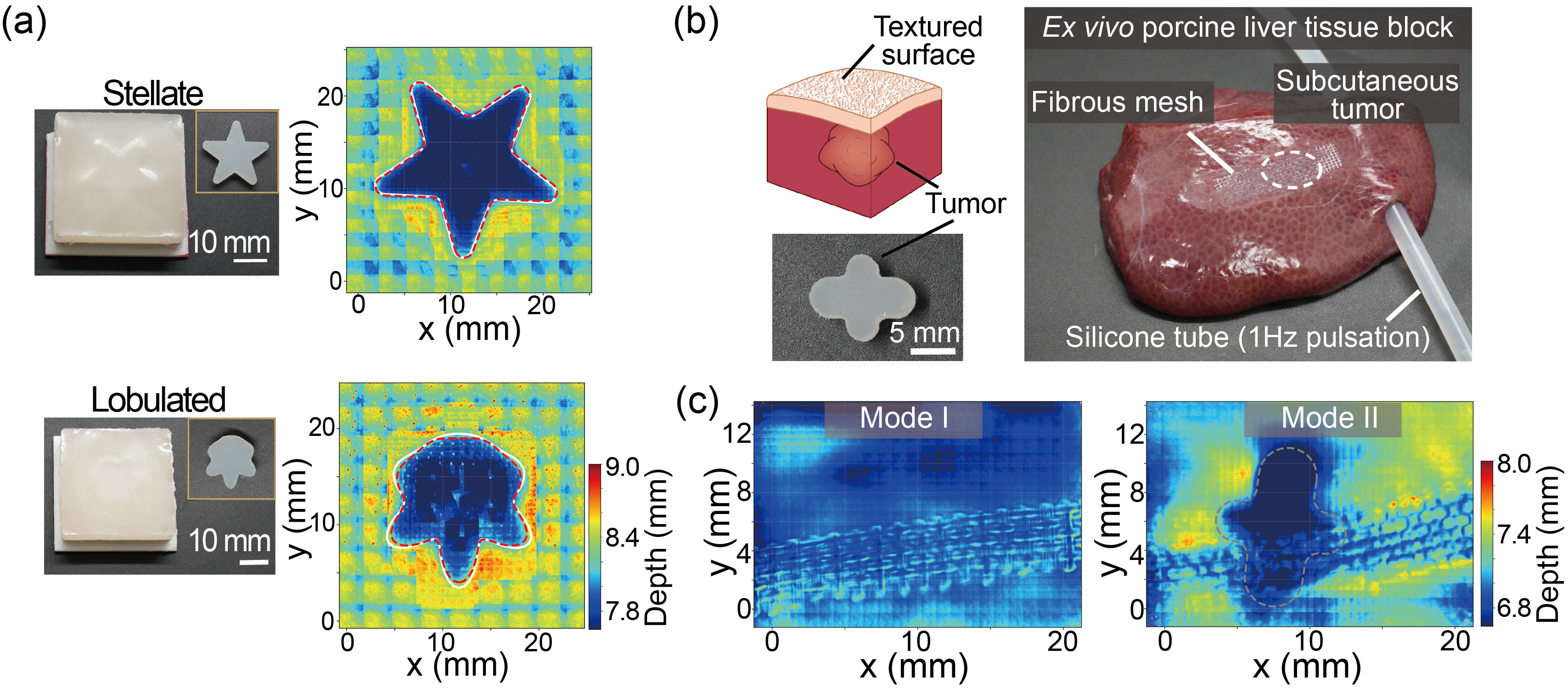
Figure 3. Decoupled Multi-Scale Measurement of Surface Texture of Ex Vivo Tissue and Subcutaneous Tumor Contour
This work systematically overcomes the mutual constraints between size limitations, variable stiffness, and high-precision multimodal sensing of minimally invasive surgical probes, providing an innovative technical paradigm for intelligent minimally invasive surgery and intraoperative quantitative diagnosis. This sensing strategy demonstrates high scene adaptability and system integration potential, and is expected to play a key supporting role in automated surgical navigation and complex intracavity operations.
This study was primarily conducted by the Institute of Robotics Research and the Department of Mechanical and Energy Engineering at SUSTech. Research Assistant Professor Dongliang FAN and Master’s student Chunyu LIU are co-first authors of the paper, while Academician Jiansheng DAI is the corresponding author. Professor Weimin ZHU and Dr. Hanyu YAO from the Second People’s Hospital of Shenzhen are co-authors. SUSTech is the first affiliated institution.
Article Link: https://doi.org/10.1109/TMECH.2026.3691370
Proofread ByNoah Crockett, Junxi KE
Photo By






