Academician Jian S. DAI, Director of the Institute of Robotics Research at the Southern University of Science and Technology (SUSTech), Member of the SUSTech-King’s College London School of Medicine, Chair Professor of the Department of Mechanical and Energy Engineering, and Fellow of the Royal Academy of Engineering, along with Associate Professor Huijuan FENG, Associate Editor of Mechanism and Machine Theory (MMT), alongside their teams, made groundbreaking progress in robotic intelligent structures and the field of transformable origami. The research was published in the top international journal Proceedings of the National Academy of Sciences of the United States of America (PNAS) under the title “Dual-Chirality Flexagon Links with Infinite Eversion and Surface Reconfigurability.”
Their research breaks the traditional limitation of artificial intelligence, which mainly relies on algorithms and computing power, by directly embedding “intelligence” into the physical “structure” itself. They proposed the forward-looking concept of “Structural Intelligence.” This marks a major advancement of the “Embodied AI” idea and opens up a whole new paradigm for future robot design, materials science, and bionics.

“Art is the source of science.” By internalizing intelligence into physical structures, robots can gain the ability to perceive and think through changes in morphology and movement. This innovative concept not only pushes the boundaries of engineering but also showcases a scientific romanticism full of “mechanical aesthetics” and “bionic art.”
The team conducted an in-depth analysis of the eversion mechanism of Flexagon structures that can be used for new types of robotic configurations (Fig. 1). They revealed, from a geometric algebra perspective, the topological evolution patterns of these intelligent structures with infinite eversion and surface reconfigurability, and successfully established a theoretical framework for cyclic transformation induced by bifurcation motion. Based on this, the team developed the Flexagon family, overcoming key physical barriers that had hindered its engineering application. This lays a solid theoretical and practical foundation for the frontier design of reconfigurable metasurfaces and multimodal robots, especially for the implementation of “Structural Intelligence.”

Fig. 1. Mechanism and Applications of Flexagon with Infinite Eversion and Surface Reconfiguration
Surface reconfiguration is a common strategy in nature for organisms like chameleons and tree frogs to adapt to complex environments. In engineering, although reconfigurable surfaces show huge potential in metamaterials, space deployable structures, and all-weather solar panels, existing methods usually only allow a limited number of surface states. The Flexagon, discovered by Arthur Stone in 1939, provides a unique idea for surface reconfiguration. However, over the past eighty-plus years, its translation into engineering applications has been plagued by bottlenecks in progress.
The first bottleneck lies in a model based on traditional origami, which assumes paper and zero-thickness materials, which leads to poor structural durability. Second, crease constraints strictly limit the dihedral angles between 0-180°, greatly hindering continuous eversion and multimodal motion. Third, the eversion mechanism is still unclear, making it difficult for multi-unit clusters to interconnect and move cooperatively, thus failing to meet the design needs of large-scale reconfigurable structures.
To bypass these bottlenecks, the research team started from the topological essence of classic Flexagon origami, transforming the traditional origami “faces” into links and “creases” into mobile joints. They innovatively proposed a dual chiral Flexagon intelligent structure (Fig. 2). Through iterative equivalent analysis, the team successfully revealed the kinematic principles during the structure’s infinite eversion process (a cyclically structured morphing mechanism induced by bifurcation motion) and used geometric algebra to fully describe the entire process of achieving infinite eversion and surface reconfiguration.

Fig. 2. Evolution Pattern of Flexagon Topology
Based on the above topological theory framework, the research team took eversion cycle and symmetry order as the basic variables, deriving four major configurations: symmetry variants, periodic variants, symmetry-period hybrid variants, and recursive variants. They successfully built a large and diverse family of Flexagon mechanisms (Fig. 3). All the intelligent structures in this family perfectly inherit the core abilities of infinite eversion and surface reconfigurability.

Fig. 3. Flexagon Family Atlas
To pave the way for applying Flexagon intelligent structures in engineering, the team came up with an innovative structural convertibility strategy. This strategy strictly avoids mechanical interference during the everting process from a geometric standpoint, and by using heuristic algorithms, it exhaustively identified all interference-free intelligent structure solutions (Fig. 4). Building on this, the team also introduced spatial tessellation and hinged stacking techniques, successfully combining multiple independent Flexagon units into large panels and complex structures (Fig. 5). This technological breakthrough completely overcomes the traditional engineering limitation of Flexagons being hard to network in clusters, allowing the team to build a series of programmable, large-scale deployable physical networks that can interconnect and move in sync, opening up wide possibilities for the development and application of intelligent structures in the future.
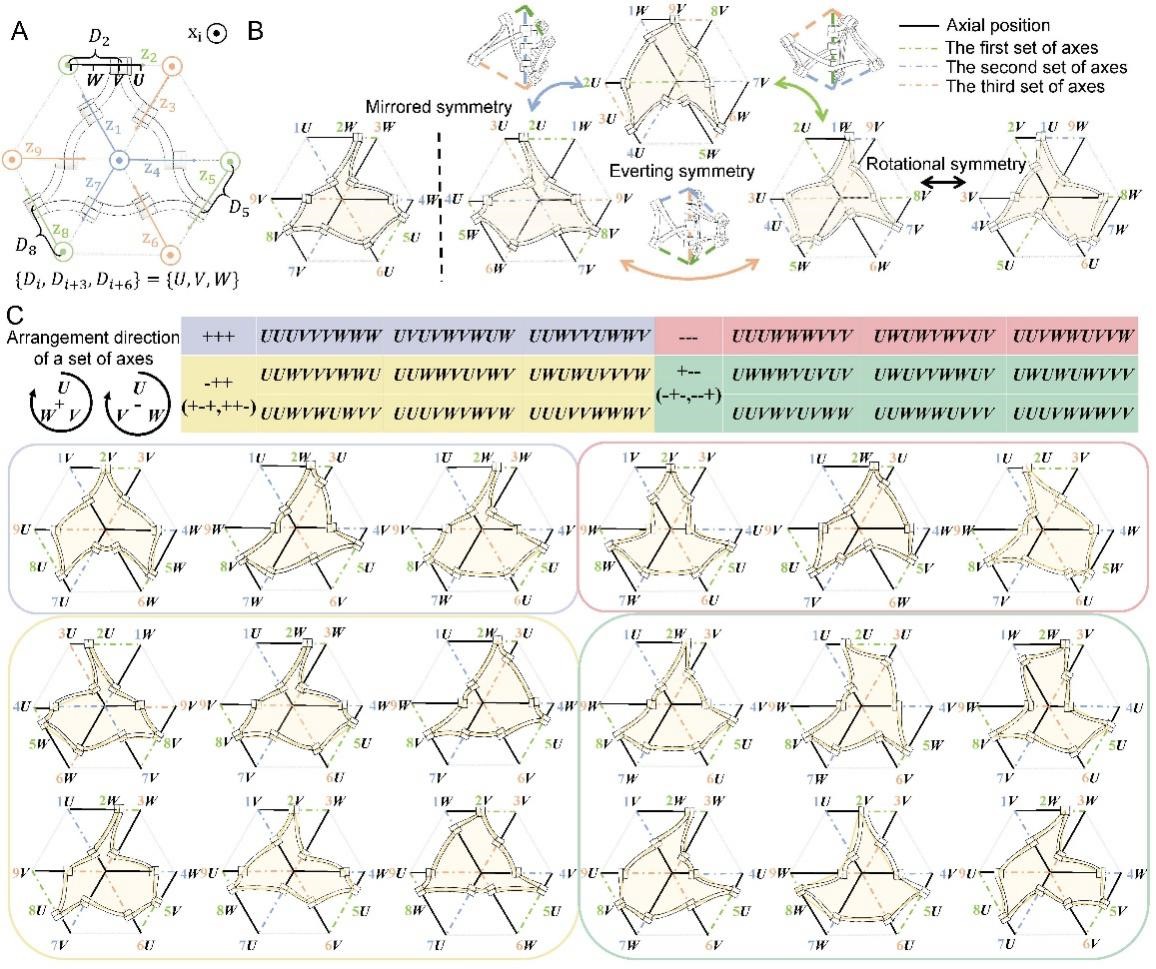
Fig. 4. Structure Convertibility Strategy for Avoiding Collision Interference

Fig. 5. Programmable, Large-Scale Deployable Network Intelligent Structure
Building on this, the team further expanded the unidirectional chiral Flexagon structure into a bidirectional Flexagon mechanism with interchangeable rotation directions (Fig. 6). This innovative design achieves an exponential jump in the number of achievable surface states. Theoretical derivation strictly shows that with each recursive expansion, the number of new states follows an exact geometric series:
p(p-1)g
(where p is the eversion period, g is the recursive generation index).
Discovering this mathematical pattern completely breaks the traditional notion that mechanisms are limited to a finite number of states, setting a whole new paradigm for the design of programmable surfaces in the future.

Fig. 6. Design Integration and State Topology of the Interchangeable-Chirality Flexagon Structure
This work successfully fills a gap in the field of infinitely everting intelligent structure design, achieving a paradigm shift from abstract topological origami to rigid-body kinematics. This achievement not only provides a solid theoretical foundation for the design of mechanical metamaterial systems with programmable degrees of freedom but also opens a clear engineering translation path for cutting-edge areas such as next-generation multimodal reconfigurable robots, deployable space structures, and soft robotics.
This study was primarily completed by the Institute of Robotics Research and the Department of Mechanical and Energy Engineering at SUSTech. Academician Jian S. DAI and Associate Professor Huijuan FENG are the corresponding co-authors of the paper, with PhD student Jiang LIN from the Department of Mechanical and Energy Engineering as the first author. Undergraduate student Zhongqi MIAO, visiting PhD student Haolin ZHANG, Master’s student Kewei DONG, and postdoctoral researcher Hongliang LU from the Hong Kong University of Science and Technology are co-authors of the article.
Paper Link: www.pnas.org/doi/10.1073/pnas.2603729123
Proofread ByNoah Crockett, Junxi KE
Photo By






